Hi there. I have large quad using:
proficnc pixhawk2, GPS and power module
Motors multistar elite 5010 274kv
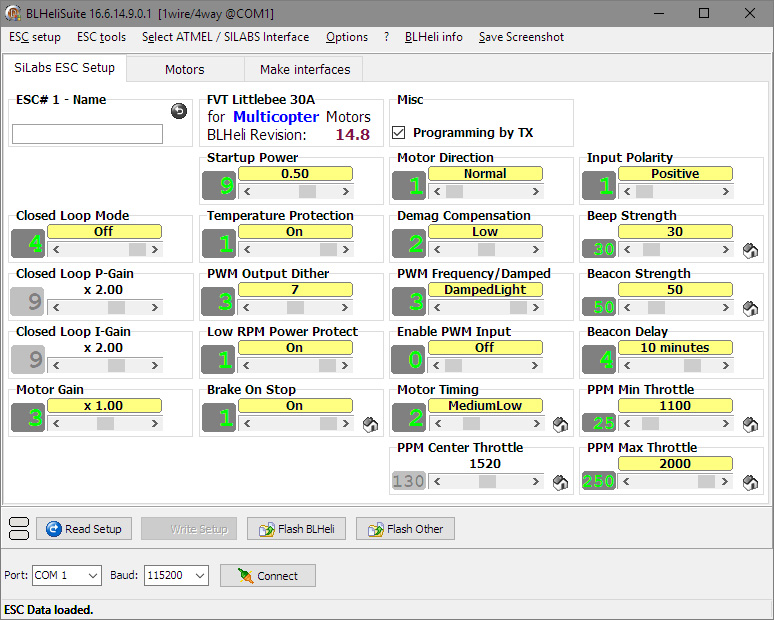
multistar v3 30A 6s ESC blheli oneshot125b (also tested with DIY 30A)
kde 18" prop
16000mah 6s lipo
futaba t10j t-fhss
I was flying with 3.4.6 and updated to 3.5.1
Frst flight was perfect but on the second flight after several min of flying (stabilize and loiter mode) I land the copter and try to take off in loiter. Then I see that one of the motors was spinning but not enough to raise the copter, then i switch to stabilize mode but the problem remain one or two of the motors ware not spinning sometimes stopping randomly. I double check everything wires, esc, motors … but the same problem remains. Then I fold apart the quad and test each component. Assembled again and the problem remains. After this I try to change the firmware to 3.4.6 but constantly getting massage from the mission planner ( Failed to download new firmware : system UriFormat Exception: Invalid URI: The URI is empty etc… I check the comport, internet connection all fine. I checked again all of this with the brand new pixhawk 2.1 (cube) but it’s all the same
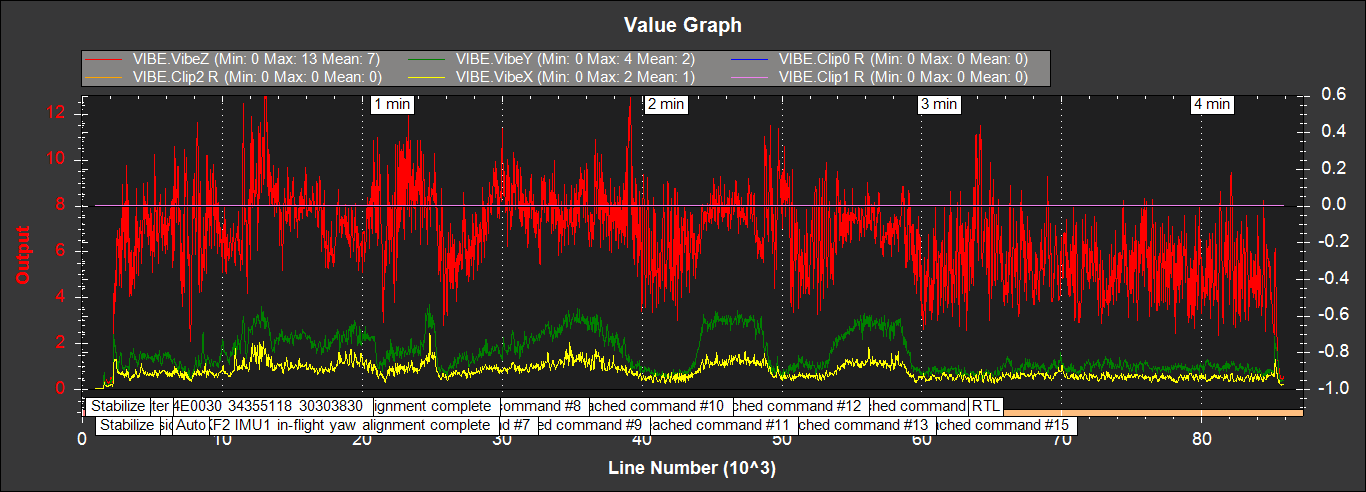
Here are the logs:
BLHeli is better suited for use with HIGH Kv motors like those used on FPV racers, and if memory serves, OneShot support was added to ArduCopter at the request of “mini” Pixhawk users who are flying racers…
Thank you for your reply Oldgazer. It was a very constructive post! I have a few questions:
It would be ideally with the pixhawk mounted on top of the hexa, but as recommended of DJI (F550 flame wheel) and other builds, everyone mount their battery on top, because its the only place to fit it. Where would you mount the battery? On my rail below the hexa, i already have mounted a gimbal and a raspberry pi.
If i were to move the battery on the rail, and the raspberry pi and pixhawk on top, i would have to place the battery a bit behind CoG. I belive this is even worse, as for now it is at least mounted in the center.
How would you propose each layer should look like, cosidering i have 3 layers (top, between, rail), and a receiver (x8r), pixhawk, mauch power module, raspberry pi, gimbal (must be mounted on rail), battery and a GPS.?
I mount the battery and gimbal on rails below the bottom plate with the gimbal forward and the battery aft. I put the battery plate on hooks and I put the gimbal plate on 4 isolation rings. Most folks but the gimbal on hooks, but I found that introduces “Jell-O”. I get much better results with the gimbal suspended from damper rings.
The top plate gets the Pixhawk on a damper mount, the receiver and so on. A majority of the wiring and any external BECs go in the cavity between the top and bottom plates.
Just a quick observation. The reason for the gps being on the mast, is to avoid interference
on the magnetometer . your battery is too close to the gps. you will be amazed how much magnetism the battery creates.
Hi
I have the same issue with the Jelo effect.
I beleave the Jelo is related with the setting of the ESC’s with Blheli, beecause the Jelo was not prrsent with the SimpnK ESC on same configuration.
So I would like to know, what is the best settings for Blheli for 700KV motors.
I use bl heli on all my flying machines. my 1.2 meter octoquad has 8 360 kv motors running on 6 cell on it with no issues.
I leave the motor timing on medium , Startup power on 1, Demag low,. I calibrate them all at once with missionplanner. I found that increasing motor startup power took away all the sync issues .
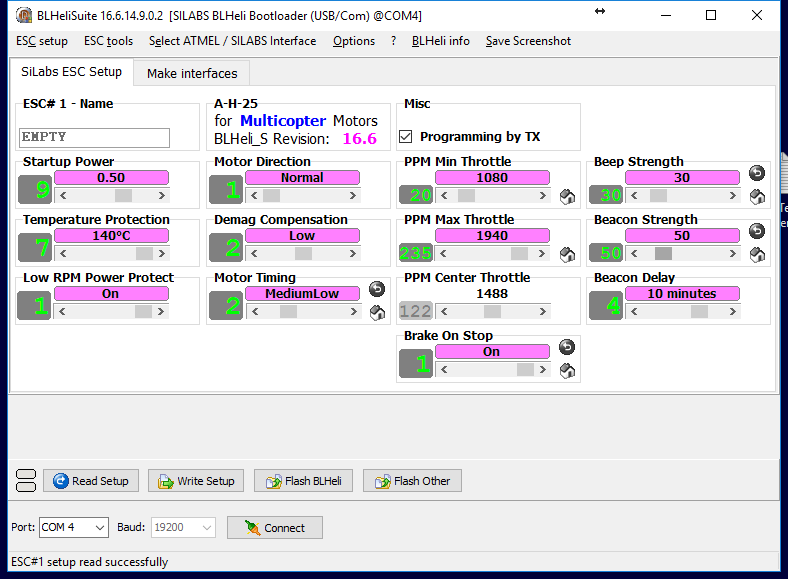
I’ve had excellent results using the following settings with the Favourite Little Bee 30A ESCs paired with T-Motor MN3110-17 700kv motors and Master Airscrew MN-series 10x4.5 props. I achieved those results after much bench testing with a smartphone vibration app. and the BLHeli Configurator app for the Chrome browser. When correctly tuned for a specific combination of ESCs, motors and props, the BLHeli firmware can provide exceptional performance for everything from camera drones to mini quads.
Thank you very much.
This is the information which I was looking for.
Now i am in a very busy period so I’ll let you know about the results as soon as I will implement (thanks to you) my new knowledge.
Finally a bit time for myself. I have different version of LittleBee than you have, I’ve make the changes in the settings and I will appreciate any additional guide for what I have. I would like to know is it anything else that can be done before I’ll test it on the field.
Hi Kirk. Looks good. During your test runs you could experiment with the Motor Timing at Medium and MediumLow to see which provides the best performance. Also, if you run into occasional syncing issues on startup you could try increasing the Startup Power to 0.75 or even 1.
Another data point for your issues is the notorious flexible arms on the flamewheels. Those plastic arms can flex causing vibrations. Some versions, by different manufacturers, are better or worse than others. There are even aluminum versions available to help eliminate the problem. So just another thing to keep in mind as a possible contributor to vibrations.
Today I tested but without luck. Unfortunately the Jelo is still there… After the changes in ESC’s I didn’t autotune because it was windy (30-45) so I hope tomorrow will be a quiet day for autotune and I’ll try it again after it. I’ll come back with the results.
I don’t think that the cause of Jelo are vibrations as they are below the critical levels.