Hi. in .tlog file You use Frame: OCTA_QUAD
X8 Frame use Octa
The icons of Frame Class in the program Mission Planner are the same. I suggest that we advise them to correct the information so that it is the correct choice.
Frame: Octa Quad
Hi anuchit_darat, thank you so much for your answer.
Also for my understanding the symbol for OctaQuad in “Frame Class” should be the same as under “Frame Type” with X-Quad coax.
I am not quite sure, if I did understand you correctly with “[…] X8 Frame use Octa”.
You say, we have choosen the wrong Frame Class with Octa_Quad and should use Octa instead?
The machine already did some 15 flights…so not quite sure about that…
We have choosen Frame Class OctaQuad, identical to our Frame (X form with coax).
Can you explain a little bit in detail, please?
When selecting the Frame type with wizard in Mission planner the Symbol for X8 is not correct ?
stil nobody able to help us to find out, why our System flipped and crashed?
Any help is more than welcome. We do fly very expensive camera Systems and cant risk this now anymore with that configuration.
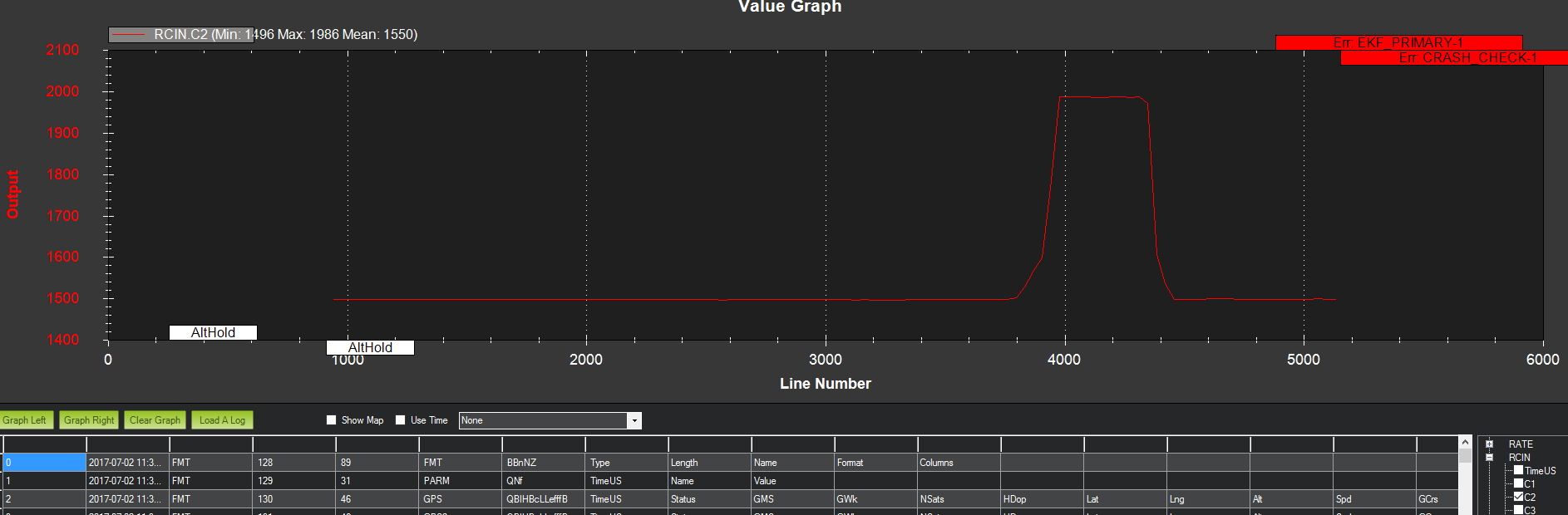
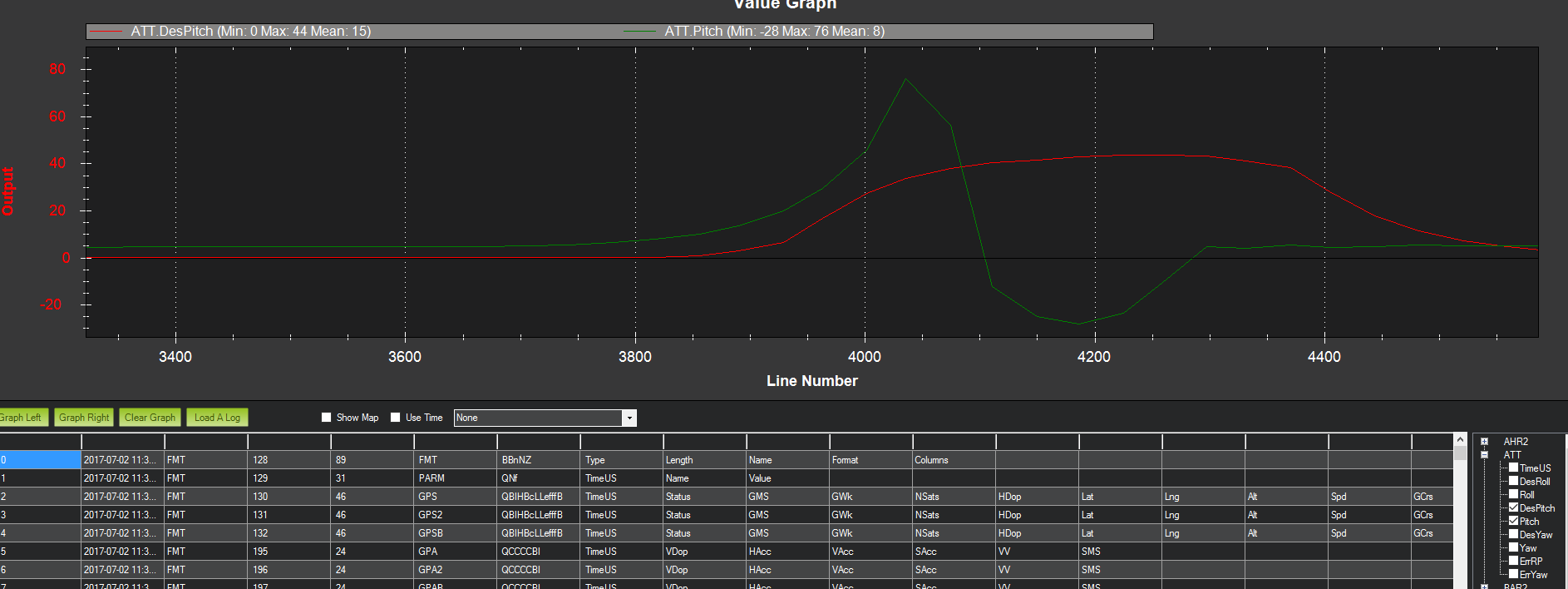
In your log it is clear that you inserted a maximum pitch command as soon as the drone wanted to take off. Can you explain why did you do that?
check these: ATT.pitch and CIN.C2