Fresh on 3.5-rc6 firmware, after a full recalibration my stabilized mode still ok
but after a few second on gps mode ( pos hold and loiter ) my pitch orizont bar start
to drift and a lot of “ekf primary change jump” start from 0 to 1 need to switc fast on stab mode
and try to land.
After a few more test and 2 complete firmware reinstall my conclusion are…
the new ekf didn’t like the standard ublox-lea6 from 3dr original pixhawk 1
i got around 8/10 gps lock but looks like new ekf sistem need better gps.
Any idea or tips ?
i’ll try to downgrade the firmware and maybe order a new drotek M8N gps.
It´s easier to recive help if you share your .log, I don´t think the lea is the problem if works well, perhaps another problem you have with config, setup, etc.; It´s usefull too if you can share a copter photo and gps place.
I did 2 more tests today and the weird behavior persists …
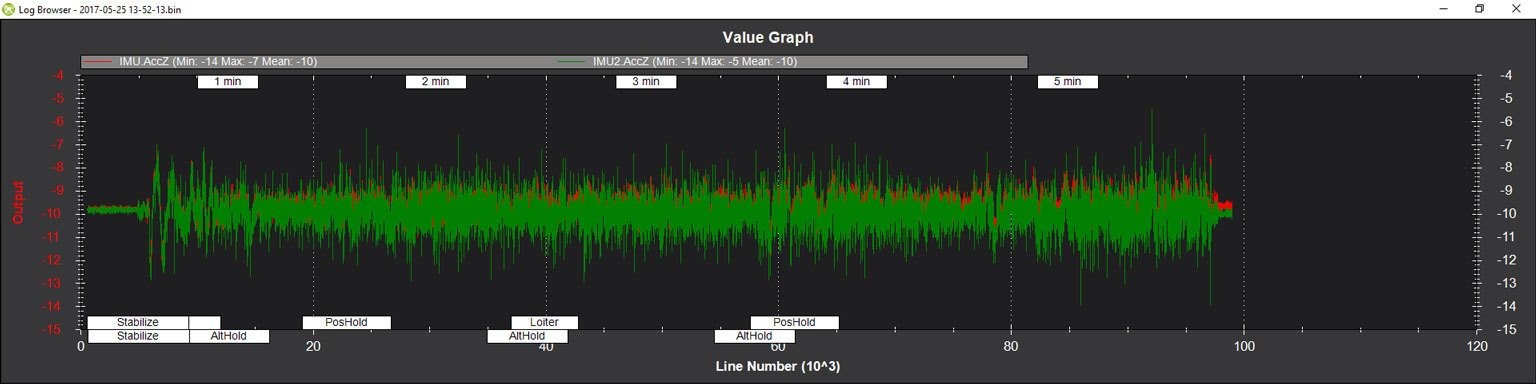
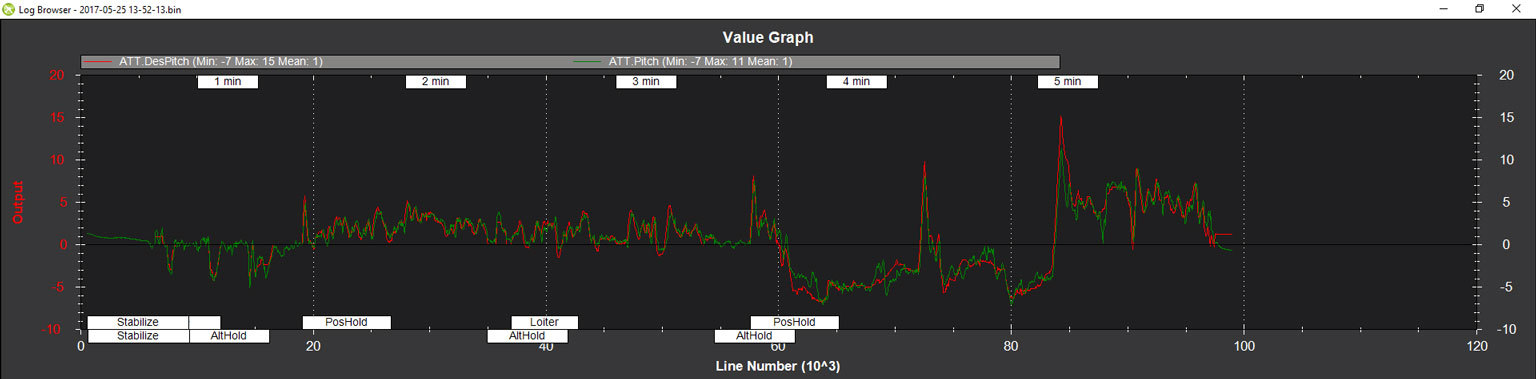
First test was just loiter in stab / alt holt / Pos Hold / Loiter
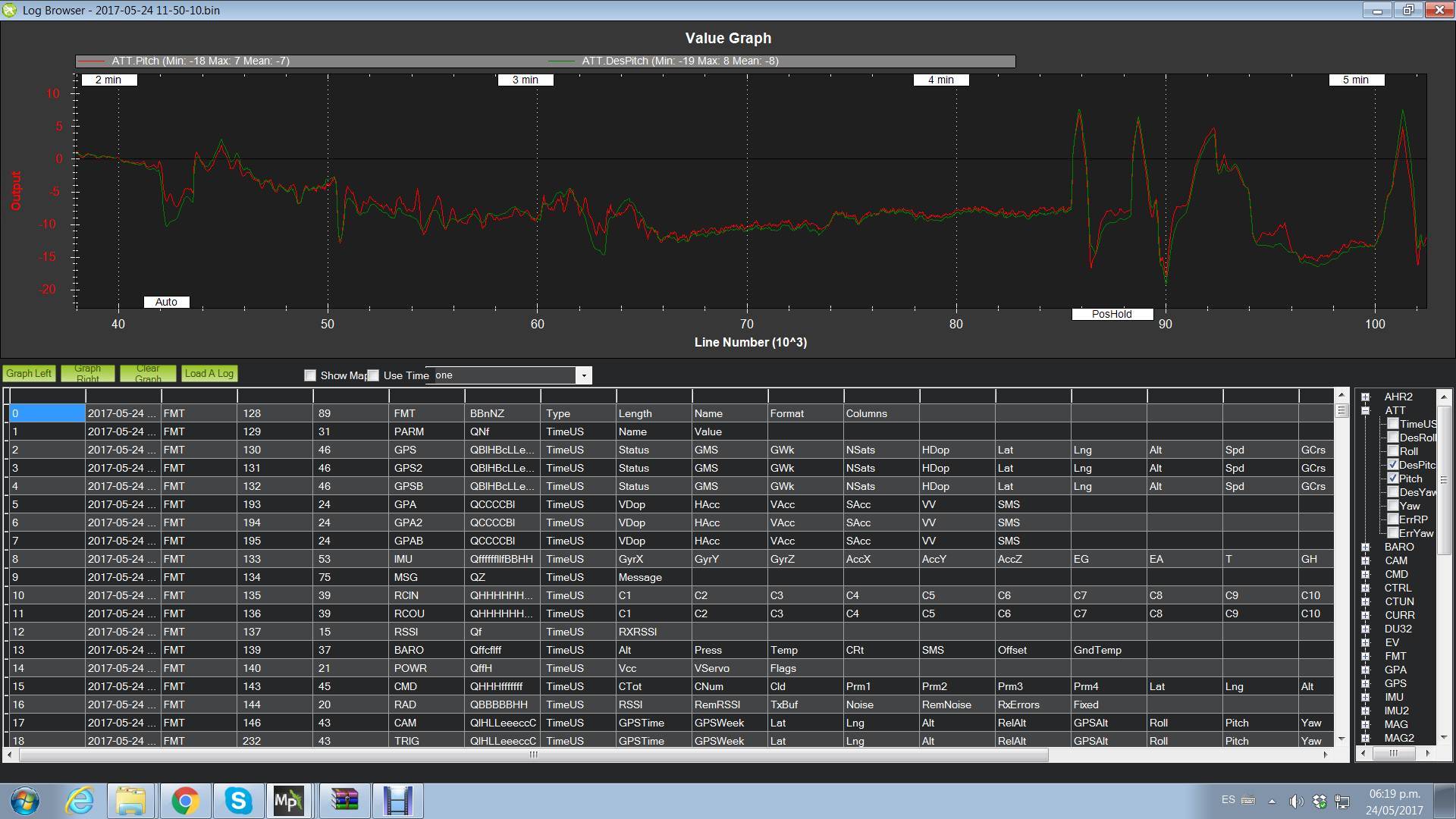
all the test present the same problem, slowly the pitc value start to increase or decrease
sometime changing from gps mode to non gps mode fix it, and i have a perfect stable loiter
even in stabilized mode in no wind condition, but for most of the time you have the pitch variation increment.
Sometime you can see the drone in loiter mode holding very well a position but acting like in fight with a costant front wind but there is no wind at all, it’s just the incorrect acc pitch.
Second test was a small survey grid mission…
The start was good but during the first 2 waypoint the ekf start to go yellow and the drone stop at the third waypoint, the yaw was not precise and realy slow during the mission orientation, definitely not a good thing
Try to disable IMU 2 (IMU2 use=0 or similar) and give a test again to see what happen, I do It in one quad and solve the problem. Strange that you don´t have any err msg.
Good Luck.



 which flies perfectly in all modes with firmware 3.3
which flies perfectly in all modes with firmware 3.3