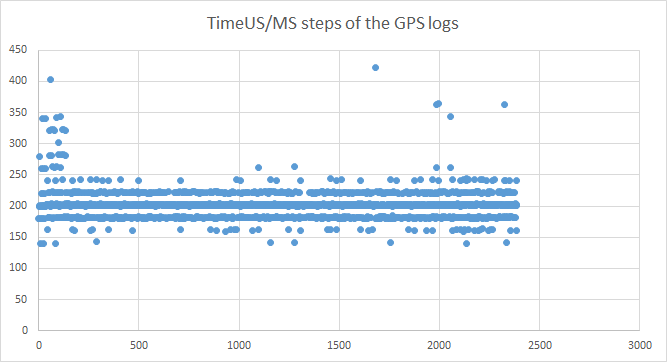
These are the TimeUS (converted to TimeMS) steps of the GPS entries. In most cases it is either +20ms or -20ms…
These are the TimeUS (converted to TimeMS) steps of the GPS entries. In most cases it is either +20ms or -20ms…
It’s not really expected to be stable unfortunately, it is still a work around that gets you closer then a 200ms step size, but I definitely agree it’s still noisy.
Just to make a couple of things clear, you aren’t seeing a GPS position in the CAM/TRIG messages you are seeing the EKF position. The altitude_gps entry is the GPS altitude, but the rest is all from the EKF. You also need to be aware that a GPS unit typically has an internal lag on propagating changes out (IE on ublox this tends to be 220ms or 120 ms depending on what hardware generation you have).
I ran some further tests and have some questions…
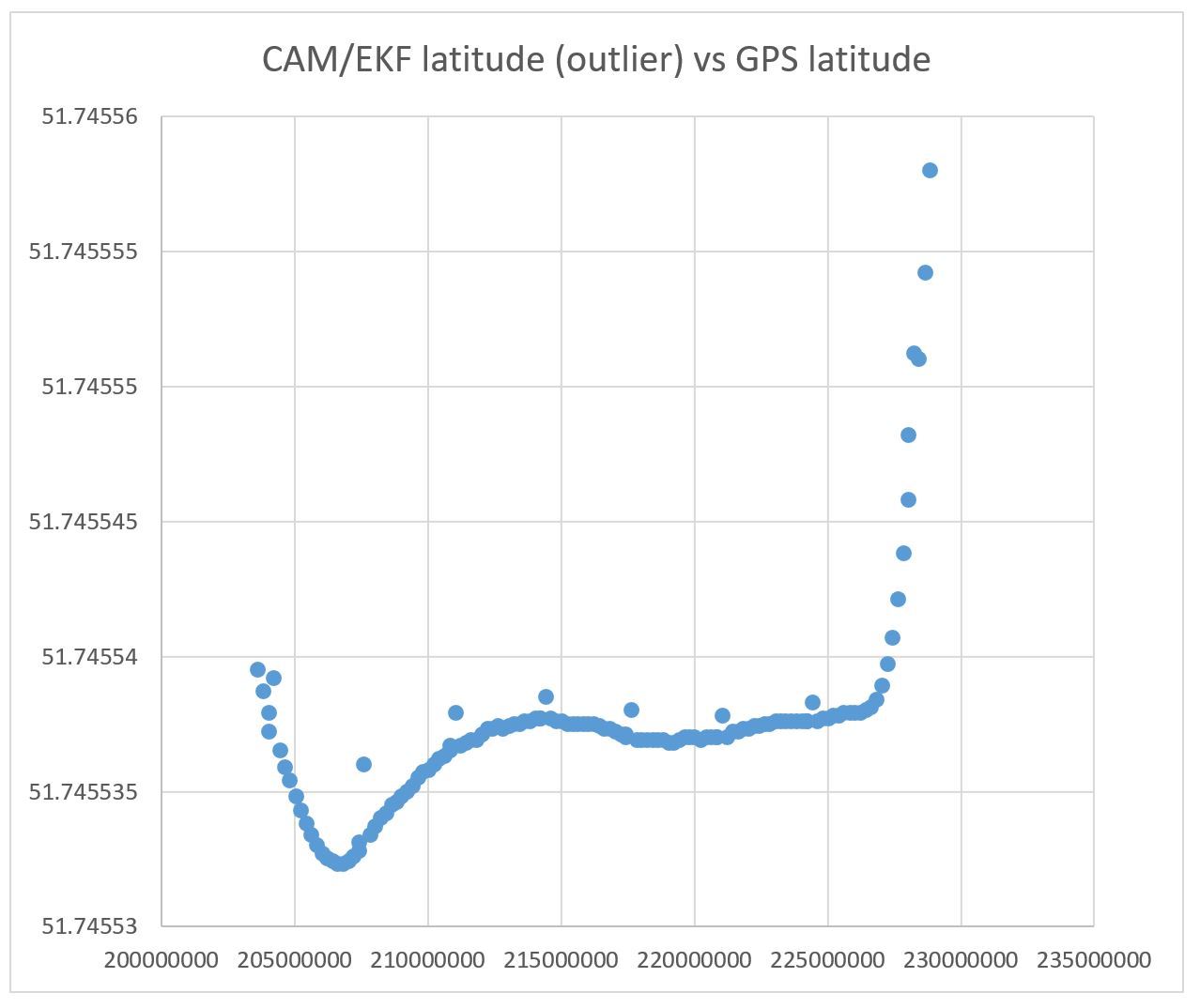
I compared CAM/NKF latitude vs. GPS latitude. If I have no bugs in my calculations they can differ by 30cm in some cases in my log. No matter if the internal lag is compensated or not.
So to get more precise coordinates for georeferencing the coordinates of the GPS messages should be used instead of the CAM message coordinates. Is this correct? For sure the internal lag has to be taken into account and some interpolation is required as well.
Are there differences between RTK (M8P) and PPK (M8T) regarding the GPS internal lag and the coordinates reported in the CAM messages?
You mentioned that the internal lag [quote=“WickedShell, post:6, topic:16798”]
tends to be 220ms or 120 ms depending on what hardware generation you have
[/quote]
220ms is the default setting in AC. What do you meen by hardware generation - M8 (120ms) and the Lea6 (220ms)?
Since there is noise, timing jitter and also sometimes missing GPS messages, I am wondering what might be the best approach to retrieve the best possible coordinates for a specific TimeUS/GPSTime. This is especially important for PPK. For example when M8T raw data is recorded and post-processed the only option to correlate the processed data with the CAM logs is GPSTime. So my question is: what is more relieable - the TimeUS or the GPSTime? I guess the TimeUS. So GPSTime should be adjusted to account for the noise/jitter?
Sorry for bothering you with so many questions!
Thanks a lot in advance!
Thorsten
Hi,
I am very interested in this too. My little experiment so far using Arduplane 3.7.1 and hotshoe on NEX 5, CAM_FEEDBACK_PIN=52 with an ublox M8N:
using MP geotagging CAM_messages Agisoft Photoscan reports
X error (m) = 4.53323
Y error (m) = 1.81875
Z error (m) = 0.440147
XY error (m) = 4.88447
Total error (m) = 4.90426
using linear interpolation on the GPS data from the log results in:
X error (m) = 2.28678
Y error (m) = 0.905592
Z error (m) = 0.982533
XY error (m) = 2.45957
Total error (m)= 2.64856
using linear interpolation and 220ms offset on the GPS data results in:
X error (m) = 0.440397
Y error (m) = 0.367895
Z error (m) = 1.04474
XY error (m) = 0.573843
Total error (m)= 1.19196
same as 3) but with camera x-offset:
X error (m) = 0.265161
Y error (m) = 0.295929
Z error (m) = 1.04285
XY error (m) = 0.397347
Total error (m) = 1.11598
Surprisingly the error had a minimum at the correct x=-0.39 offset value, -0.38 or -0.40 and error was bigger.
same as 4) but with camera z=0.7 offset:
X error (m) = 0.254608
Y error (m) = 0.286169
Z error (m) = 1.04423
XY error (m) = 0.383038
Total error (m) = 1.11227
Z=0.7 resulted in the minimum on total error, but z-error went up.
Edit: update
Everything the same as in 4) except altitude values recalculated using baro height
X error (m) = 0.265181
Y error (m) = 0.29574
Z error (m) = 0.409101 (was 1.04285)
XY error (m) = 0.397219
Total error (m) = 0.570217 (was 1.11598)
Hi all,
Thank you for the valuable feedback. It’s certainly generated some interesting discussions!
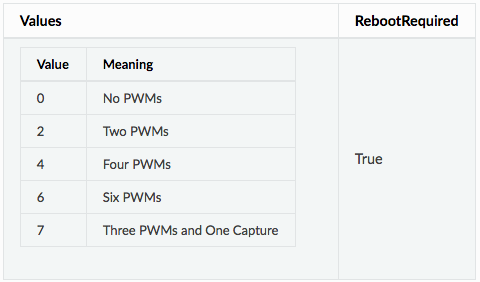
@lucamax Valuable reminder about BRD_PWN_CNT =4! As I require a minimum of three PWM outputs (tilt/roll/camera trigger) I will try to change to BRD_PWN_CNT = 7. This value should provide three PWMs and one capture.
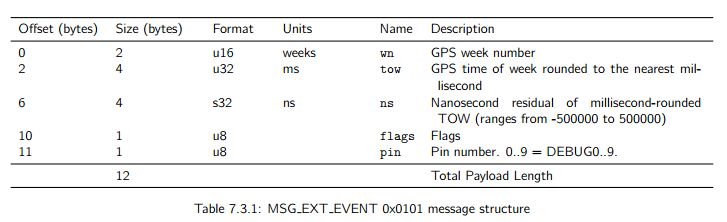
@WickedShell I appreciate the detailed explanation regarding how CAM messages are generated and their associated uncertainties. It seems that my best option may to redouble my efforts at getting the Piksi Python scripts working. According to the Swift Navigation Binary Protocol (SBP) documentation, the external event is precise to the nearest rounded millisecond. The Piksi datasheet states that position/velocity/time solutions are calculated at 10 Hz, so I wonder if this means that the Piksi is producing additional time solutions on the fly.
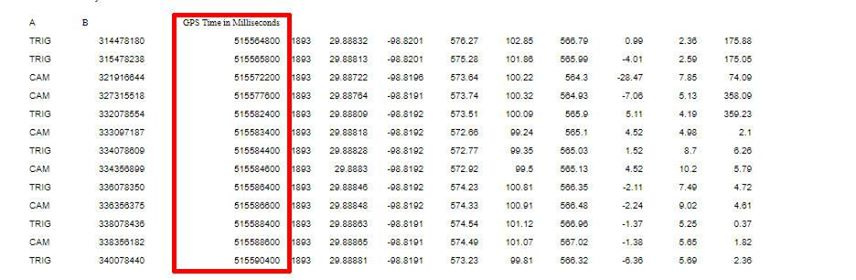
A typical external event trigger message including a GPS TOW to the nearest millisecond is shown below. I am unsure of the internal lag inherent to the Piksi, and to what extent it could be influencing the accuracy of the timestamp. This may be a good question for SwiftNav. However, if the time is correct, then could it not be used to interpolate a precise and accurate location from the PPP post-processed RINEX data? I unfortunately don’t have a great deal of experience with interpolating positional data as of yet, so I’m not clear on the feasibility of this idea.
{"data": {"sender": 10878, "msg_type": 257, "wn": 1945, "tow": 513482342, "crc": 27012, "length": 12, "flags": 0, "pin": 0, "ns": 364413, "preamble": 85, "payload": "mQdmHpsefY8FAAAA"}, "time": "2017-04-21T23:41:08.845000"}
@Thorsten Thanks for all the great information on the TimeUS and GMS differences! It’s interesting to see just how difficult it is to determine a suitable offset, and how much the noise/jitter can influence this value.
@ultrafuge Great experiment! I’m keen to learn more about it and impressed at how much the error was reduced by interpolating and including an time offset. For the x & z offsets, I am assuming these refer to the horizontal and vertical offsets between your camera and GPS? Very strange that your Z error would increase when accounting for the vertical offset. Did you also have ground control points to compare your results with? Ideally I’d like to conduct a similar test in the near future.
Cheers,
Adam
Yes, basically the GPS is 39 cm ‘behind’ the lens (x=-0.39), y=0 and z should be a few cm.
Not really accounting for vertical offset, because the physical z-offset is less than 5 cm, I was just trying to get the ‘total error’ to the minimum by playing with the x, y and z offsets. This ‘total error’ minimum happened at (x=-0.39, y=0,) z=70 cm and the z-error increased by only 1.38 cm - confusing, especially considerung, that any deviation from the physical correct x <> -0,39 or y <> 0 made the result worse.
200ms or 240ms time offset was worse than 220ms.
Case 1) uses baro altitudes, all other data uses GPS-altitude.
Sorry, no GCPs.
I expect to get much better results with the emlid reach, but I need to get better antennas.
An alternative (PPK): http://rtkexplorer.com/how-to/hardware-projects/
Hi everyone,
I am very happy to find this debate (thanks to adam.g) and
that some people are also struggling with this time mess:)
I read all posts and have some questions. I take M8N and connect it
to computer. I close all NMEA messages, but the one with time and
raies BAUDRATE to 115200. What accuracy should I expect? Would
it be stable or very noisy? Is there a lag of 220 ms? Is there any test/datasheat/answer
from ublox about this lag?
And also another set of questions. The M8N timepulse should be accurate
way below microsecond. So the combination of timepulse, nmea time
and microcontroller would give the result? Microcontroller would
parse nmea time message, timepulse and camera trigger would be used as interrupt.
Would that go?
Far more comments have come in since last night, and far more then I have time to respond to at the moment!
@Thorsten I’m trying to understand your graph, but I’m not following what I’m being shown.
ArduPilot is already doing Lag compensation for you on the solution output by the EKF. Depending upon your flight speed 30cm is quite reasonable (even tiny) for the difference between EKF vs GPS distance) assuming that you are using a hot shoe to get feedback when the camera takes a photo. This can easily be 0.1 seconds (or worse) from the moment you command taking a photo (which always aligns with a new GPS update at the moment).
I’m afraid I can’t recall off hand if the M8P came out different then the M8T. At the moment our level of detection is only telling us major versions (ublox 5/6/7/8). If you don’t set the parameter value we will select the GPS_DELAY_MS parameter we will attempt to select the best value for a u-blox driver, while any other GPS will just use 0.2 seconds. So what I meant by hardware generation is that we use 0.12 seconds for a ublox 7 or 8, and any other ublox we use 0.22 seconds.
GPSTime is the iTOW, it’s timestamps shouldn’t be adjusted however you are seeing the timestamp when we actually log a GPS message which does give you a sense of when that actually is arriving.
@ultrafuge Biggest surprise is that 1) should have been as good (or better) then 3 in theory (at least without using an RTK GPS)…
@adam.g BRD_PWM_CNT must be a multiple of 2, 7 won’t work, you should see an error print out on the debug console if you had a debug cable attatched.
ArduPilot handles 10Hz messages quite well, and I know that the SBP2 driver that just went in is setup/tested that way. @njoubert whats the requested update rate of the SBP driver?
The external event pin is exactly what you want to be using for this! Ideally you would either be working on an RTK data set, or PPK it first, then you can do exactly the interpolation as you were thinking. You will get better results if you know the internal lag, but this is the best path forward. You just need to manage the interpolation. (Hint: avoid floats for processing, doubles might be okay, but absolutely avoid using a float anywhere in the interpolation  )
)
We should note that the numbers from @ultrafuge’s test are the reconstruction errors, and don’t actually reflect on the real world (absolute) accuracies, however reducing reconstruction error is always good (although sometimes this can actually just be an excacerbated toilet bowl effect, I don’t think that’s what you would see with the corrections that were done.
@jero If you are going to do an external solution use the PPS pin. Once we support that in ArduPilot that will be even better but, we aren’t there yet. For the record the PPS timing will actually change depending upon hardware version/settings, so it’s not the perfect solution, but it is much, much better and still the one we should be chasing.
Thank you VERY much for all the infos !
My little experiment is for sure not claiming the absolute truth, but the results are derived from calculations with the log data. I will try another data set in the next weeks.
Doing some calculations with baro altitude I get these results:
Everything the same as in 4) from post #8 except altitude values
X error (m) = 0.265181
Y error (m) = 0.29574
Z error (m) = 0.409101 (was 1.04285)
XY error (m) = 0.397219
Total error (m) = 0.570217 (was 1.11598)
Hi folks!
Yup, the latest SBP2 driver for the Piksi Multi GPS runs quite comfortably at 10Hz. We ship Multi with a 10Hz update rate by default.
@adam.g Nice to meet you! I’m here at Swift, working on our UAV drivers. Are you using the original Piksi or the new Piksi Multi?
As for the external event trigger: you get even better than millisecond accuracy. When the event pin is triggered, we generate a tag inside our hardware FPGA that’s nanosecond-accurate. The SBP message contains both rounded milliseconds and nanosecond residual. This event trigger is separate from the position solution, so if you want to know the exact position of that event, yes, you have to interpolate. I like the idea of generating a PVT solution for an event trigger - I’ll bring it up with our estimation team.
You also mention the ability to extract GPS data from the Pixhawk driver’s logs. We do have that functionality, I can help you get that up and running if you need that.
I’m also curious how the Reach solves your problem? Ive looked through their docs, and AFAIK all they’ve done is reuse the code I’ve written for SBP to parse their binary protocol for RTK - they’re using the same RTK injection system I originally developed. Seems like the specific thing you need is easier post-processing, is that right? That’s useful feedback for us, so I can prioritize what we work on.
Cheers and thank you!
Thanks again everyone for your insightful comments!
@WickedShell, I thought that BRD_PWM_CNT = 7 sounded a bit funny, but the value was listed on the ArduCopter Complete Parameter List (http://ardupilot.org/copter/docs/parameters.html#brd-parameters). Perhaps 7 is a mistake?
Thanks also for the confirmation on using the external event pin and for bringing @njoubert in to the discussion. Hopefully he’ll be able to help us with extracting the data recorded by Piksi from the dataflash logs. Time for me to get reading on post-processing!
@njoubert I appreciate for the additional clarification on the SBP message! I believe Dennis Zollo had created a Python script to perform this interpolation last year, so you may want to check with him. The lack of easy post-processing solution for the Piksi has been an issue for us, and this is why the Reach had been suggested. I believe providing the end-user the ability to interpolate a PVT solution would be a really great idea! I’d also love to get your help with extracting the GPS data, and have sent you a message detailing some of the progress I’ve made.
Cheers,
Adam
@adam.g Your right I missed that one! It’s still in the code (I have no clue what the actual pin mapping is but, does look useful).
@Thorsten, did you find a way to extract the gps position with the CAM message, and not the position from EKF?
With my tests, while not flying, with a TERSUS RTK GPS and surveying Equipment, I got an average 10 cm (5 cm to 30 cm) difference between the CAM messages and the GPS2 messages extracted just before of after the photo, while not moving the drone (on the ground).
Comparisions between surveying and GPS2 messages is 0.5 to 2 cm in XYZ, no more! Excellent!
Is it a way the CAM message gives the interpolated RTK position, or to give priority to RTK positions?
RTK is 10Hz, whereas IMU with EKF is 400Hz
Hi @pica,
I have not looked much deeper into it and in most cases rely on what @WickedShell wrote:
As this should be the difference between the two GPS, you could use the GPS time to synchronize both. Do you have a dataset (images and dataflash *.log) to share so I could run some tests in Mavis (mavis.bitmapping.de)?
I don’t mean to revive a relatively old topic, but I’m still wondering if the DataFlash Cam event timestamps are still rounded to the nearest 200ms, or if they are logged as the exact time that they happen (assuming the resolution is 1 ms). I’ll be using a hotshoe feedback cable (for Capture) and RTKLIB for post-processing and interpolation, and plane 3.8.4.
Not sure what you mean. Depending on your hardware you can use the standard or the fast port for logging the CAM events. In post #12 WickedShell is talking about 120ms and 220ms delay for ublox.
Will the fast port log the instantaneous timestamp from the system clock, or will it use the nearest GPS update timestamp? According the the following log reference, it’s still rounding the timestamp to the nearest 200ms. This isn’t my log though as I don’t have the equipment to test at the moment.
Sorry, @Naterater I don’t remember.
For geotagging your pictures to get faster photo alignment in Photoscan, Pix4D, etc. you don’t need more than MP and standard port for a standard GNSS. You can try hard to get the camera location error down, but it will not reduce pixel error as standard GNSS error will be an order of magnitude higher than what you get from a decent camera and accurate GCPs. You need PPK(or RTK) to reduce GCP count. As usual YMMV depending on what you really need.
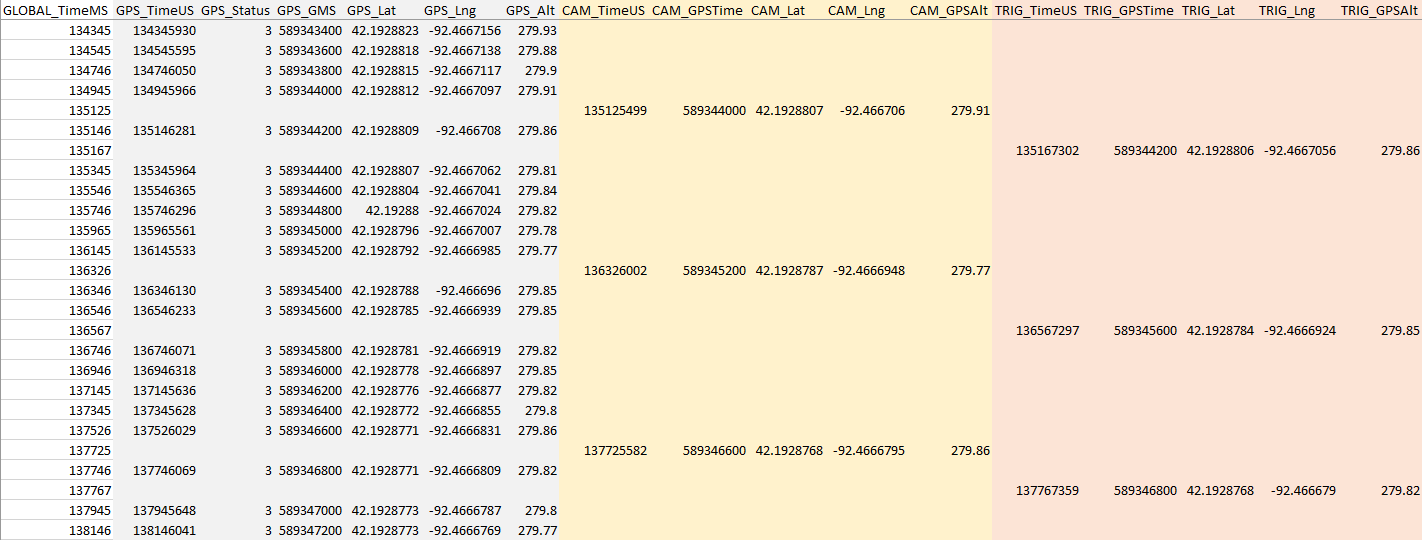
That’s exactly what I want to do @ultrafuge, I have the Here+ reciever that can be log raw GPS data for PPK correction; HOWEVER, every “TRIG_GPS Time” is rounded to the previous GPS timestamp (not the exact GPS time). I would venture to assume that I need to correct this timestamp so it can be properly interpolated. Keep in mind that 200ms is about 30cm of distance for fixed-wing planes, and that is unaccpetable accuracy whent the GPS itself can do much better. Please see the attached screenshot of a CSV export of GPS, CAM, and TRIG messages from a simple walking test. You can see that the TimeUS resolution is 1ms, and it appears that it is accurate. The GPS timestamp is rounded to the previous GPS location and time though.
I never tried Here+, I made some flights using Emlid’s Reach module a year ago. If you are flying in an area with clear sky view and you are using a copter that stops for every picture it seems to work reliable. Flying fixed wing in a canyon is ofcourse another story. I would recommend using GCPs until you are confident your setup works 100%.
YES, I wrote my own program where I could adjust the delay as well when I played with M8N and got better results than with MP geotagging.
15 m/s * 200 ms = 15 * 0.2 = 3 m = 300 cm
Some things to consider if you want mm precision …
Here they say: ‘You will need to configure one of the AUX pins as a digital output/input, and connect it to the camera flash hot shoe (a universal camera hot shoe is required). The pin should be held for at least 2 milliseconds for reliable trigger detection.’
I don’t know if this means the port registers the leading edge of the hot shoe impuls or if it waits for at least 2ms and than registers the impuls ?
15 m/s * 2 ms = 15 * 0.002 = 0.03 m = 3 cm
If your camera is set to 1/1000, when does it trigger the hot shoe ? At the beginning, the middle or the end of the 1/1000 ?
15 m/s * 1/1000 = 15 * 0.001 = 0.015 m = 1.5 cm
How accurate can you measure the offset of camera and antenna ?
What is the delay of your GNSS ?
Don’t get me wrong, IMHO PPK is great for mapping areas where it is impossible to place GCPs.