Hi all,
In a similar nature to another post, I’m exploring the potential of using the Swift Navigation Piksi RTK GPS to eliminate the need for ground control points. I’ve run into a few issues however with obtaining a precise GPS timestamp of when my camera shutter is triggering.
My hexacopter setup includes a Seagull UAV #MAP2 that enables the Pixhawk to directly trigger a Sony A6000 camera, along with a Seagull hot shoe connector to precisely log when the shutter triggers. GPS1 is a uBlox NEO-M8N, while the role of GPS2 is fulfilled by the Piksi, but only in a logging capacity.
The initial thought was to timestamp when the shutter triggered using the Piksi, which has the ability to log external events. However, the Python scripts that should enable a user to parse out the relevant information from the Pixhawk’s dataflash logs were never fully developed by Swift Navigation. Despite some limited assistance from SwiftNav, I unfortunately haven’t been able to get these scripts working.
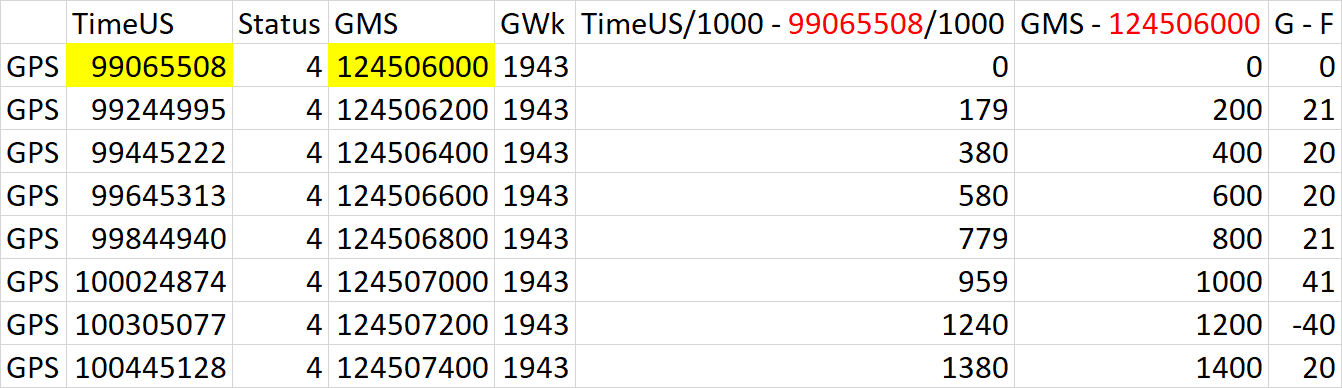
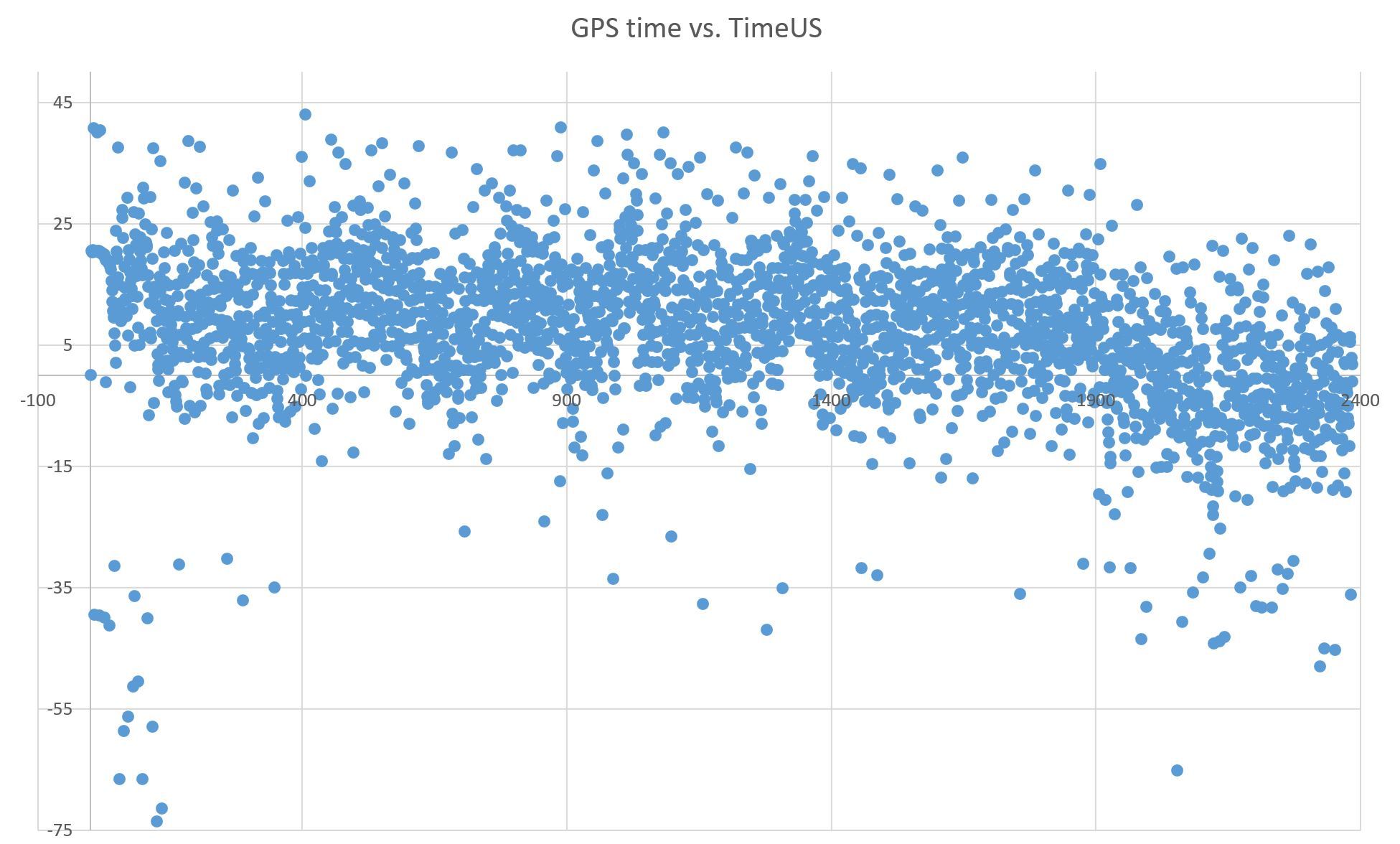
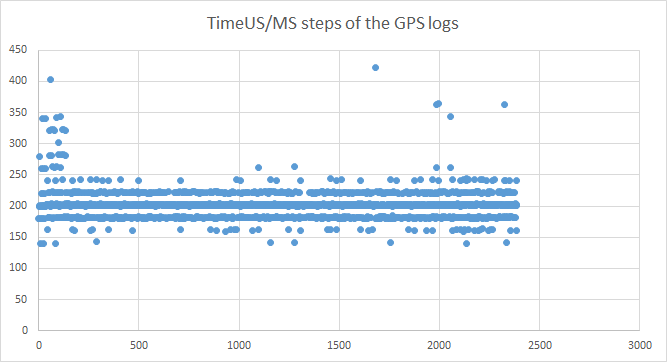
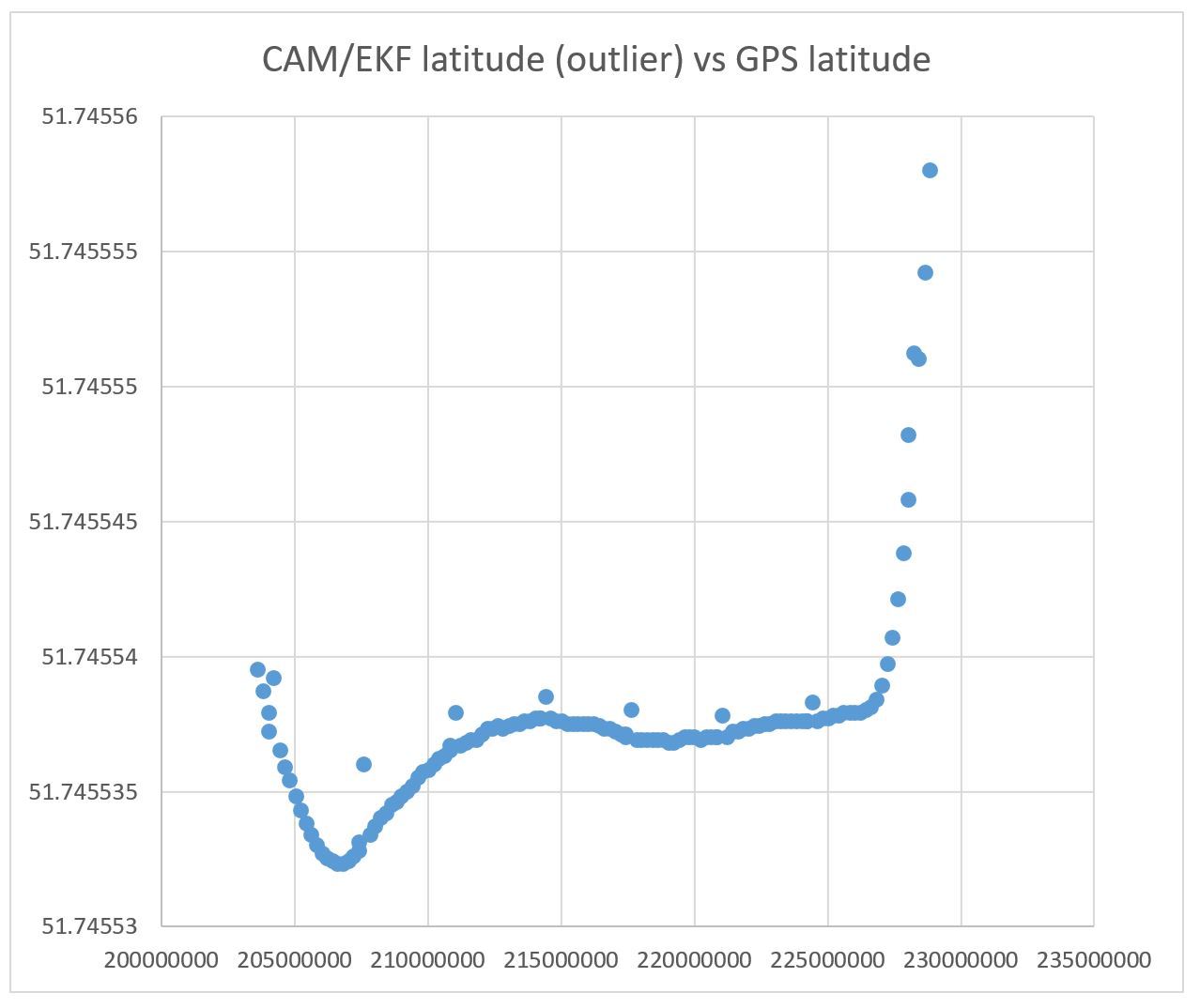
This led me enhanced camera trigger. I envisioned it could be used to obtain a precise GPS timestamp of the shutter event that could be employed (i.e. interpolated) later during the post-processing of the Piksi RINEX data. With my hot shoe connected to AUX5 (CAM_FEEDBACK_PIN = 54 & CAM_FEEDBACK_POL = 0), the camera trigger logging has done a great job of providing reliable CAM messages. The issue however is that the precision of the GPSTime in the CAM messages appears to be limited to 200 ms (0.2 s). Given even modest flight speeds of 5 m/s, this represents an uncertainty of 1 m, which is understandably much too coarse of a location. I’ve observed in the data flash logs that GPS messages are also limited to the same millisecond precision, so I wonder if this is where the issues stems from.
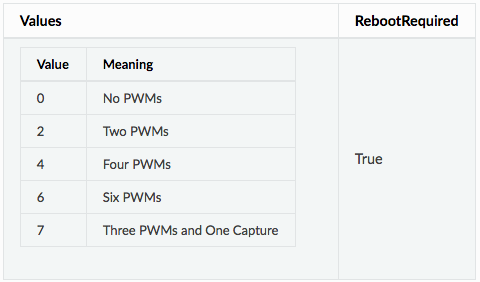
I am also curious if the “fast capture” AUX4 (pin 53) could be a possible solution. In the CAM_FEEDBACK_PIN description, AUX4 is said to be able to provide up to 1 microsecond precision, but I have not been able to produce any CAM messages with my hot shoe connected to this pin as of yet. I am also unsure as to how this timestamp is calculated.
I’d appreciate any help or suggestions that could be offered! While the general consensus appears to be to simply “buy an Emlid Reach”, I’d like to at least attempt to make use of the investment we made (regrettably) in the Piksi.
Cheers,
Adam
 )
)