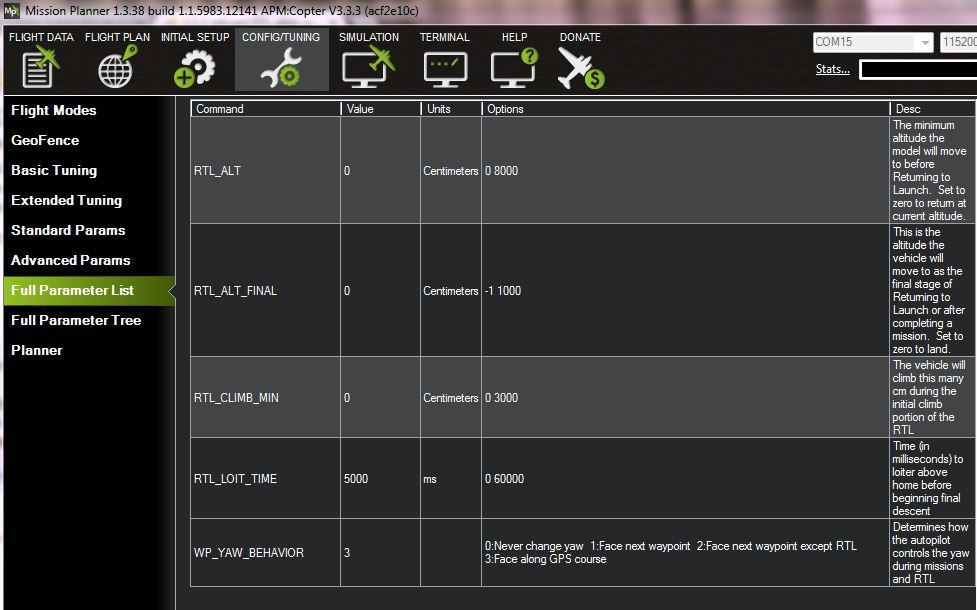
I don’t see an RTL refusal anywhere on that picture…I do see a mode change to RTL however. Have you checked to see what your RTL_ALT is set to? You might be surprised to see it set to the final altitude it ascended to when you set it.
EDIT: Also, I don’t see where you’ve posted the bin file.
Yes, zero should make it return at current altitude, but not sure how that works out in guided mode.
Never understood why anyone would set that to zero. The whole point of RTL is to return the vehicle home safely especially if there was a failsafe. What if you have a stand of trees in between that location and home? You’ll be flying right into it. I usually keep mine at about 125 feet to be safe.
Exactly my point: Guided mode initiated by follow me is doing something very wrong! Perhaps trying to find altitude zero and going up to find it? (Just guessing).
RTL @ current altitude is very useful:
Taking photos of a bridge’s arches (RTL @ current altitude you won’t hit the bridge while going up)
Looking at high voltage electric poles rust level: RTL @ current altitude will avoid that your aircraft hit the power lines!!
And so many other applications… Each situation or “mission” is different.
the aircraft will always climb up after the RTL is intiated. this will first climb to RTL height. Not coming to home may be because of waypoint radius parameter. please make it 2+ meters. if it is ‘0’ it will not move to next waypoint or Home.
@novaent ravi
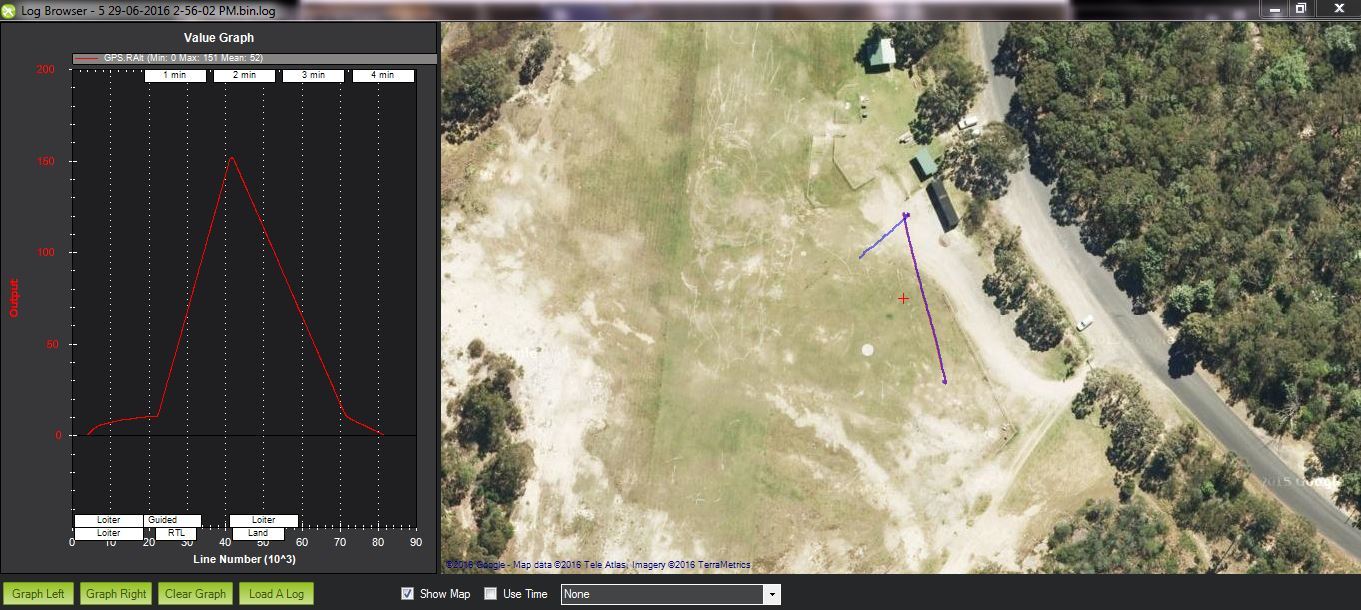
If you refer to the posted screen grab at the beginning of the thread, RTL_ALT is zero. Will check waypoint radius. My point was that it started to go {somewhere} but I had to interrupt and change to land as the aircraft was more than 150 metres high!
Radius parameter checked: 2 meters.
I believe it was trying to go back home, only at a wrong altitude…
This happens only after “follow me” or after starting “moving base” The two sub functions seems to “plug” the absolute altitude in the relative one used by RTL.