Greetings!
I have recently started working on my Quad again in hopes of sorting out a long lasting Vibration issue I am/was having ever since switching to APM.
Because of the Automatic Log Analyzer only ever so often actually spitting out a report ( Bad Input File ) I’m kind of forced to ask for a 2nd Opinion other than my own - The Vibration Section is a little scarce on how the Vibrations 3.3 should be read ( other than mentioning Clip )
Over the past week I basically tore the Quad apart starting from Scratch with only the bare necessary required for flight while also using smaller Kyosho Gel Pads and also ensuring that no cables would create a vibration bridge between the frame and the FC - At least I tried.
Logfile without GPS Mast and deactivated but installed Gimbal:
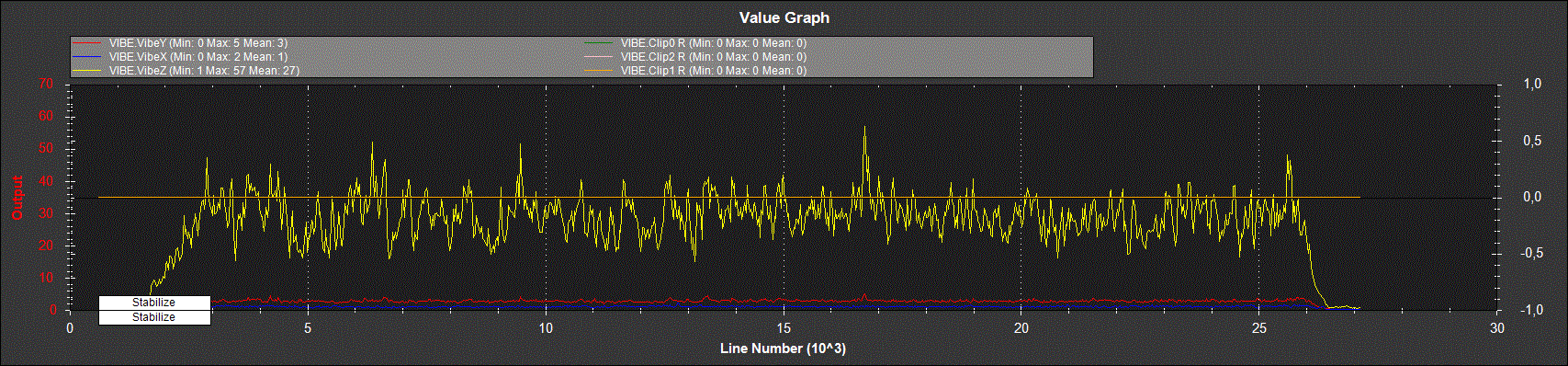
Click Image for Logfile stored on OneDrive.
Logfile without GPS Mast and activated Gimbal:
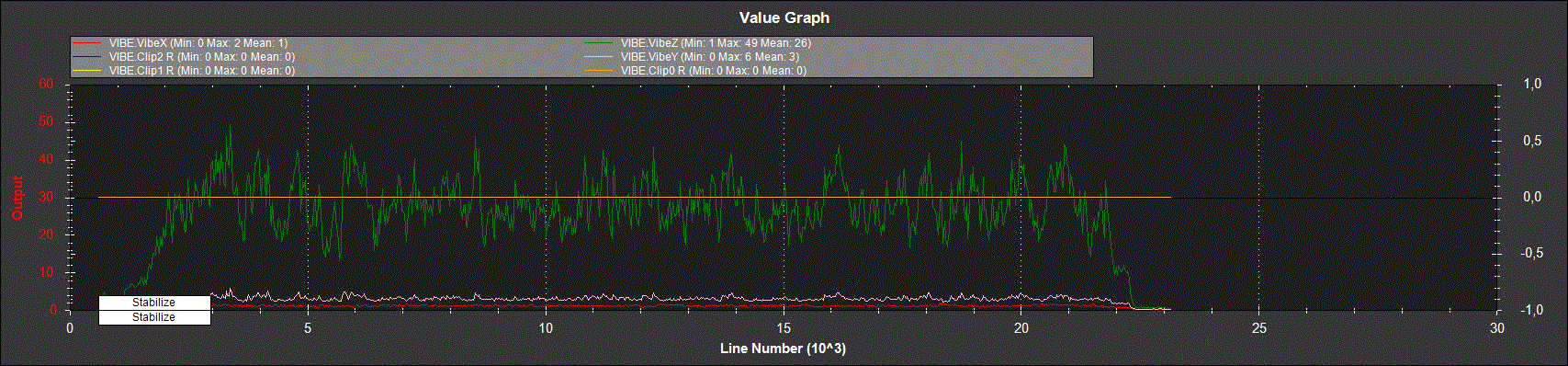
Click Image for Logfile stored on OneDrive.
Logfile with GPS Mast and activated Gimbal:
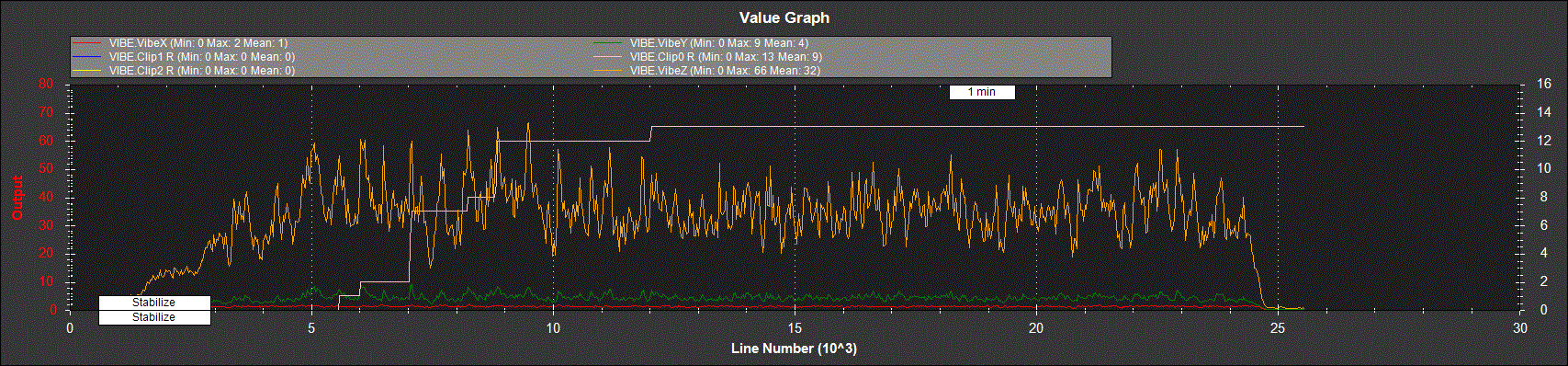
Click Image for Logfile stored on OneDrive.
Of the three Logfiles only the last one gave me an Automated Logfile Reading - For once with a GOOD on IMU Mismatch:
Test: IMU Mismatch = GOOD - (Mismatch: 0.48, WARN: 0.75, FAIL: 1.50)
Question though… Is this good enough?
Picture of the Quad itself:

Thanks in Advance =)