Just joined and this is my first build so the learning curve is steep I appreciate any help or comments as I am out of ideas at this time.
Copter/Flight System
DJI 450
DJI E310 Propulsion system (motors, ESC, Props)
3S 5000 MAH Batt
Pixhawk flight controller -APM V3.4.3 Firmware
Tx X9D-plus with L9R Rx
First crash partially my fault original flight with 4S Batt to much power so changed to 3S to have better control and failed to update the the low battery setting. I heard the Pixhawk low battery alarm (constant beeping) but instead of doing RTL on low battery it flew away went up about 5’ titled about 30 deg. and crashed about 100’ from its launch position. I had a GPS lock before arming for flight and flight mode was Stabilize. Result was two damaged props.
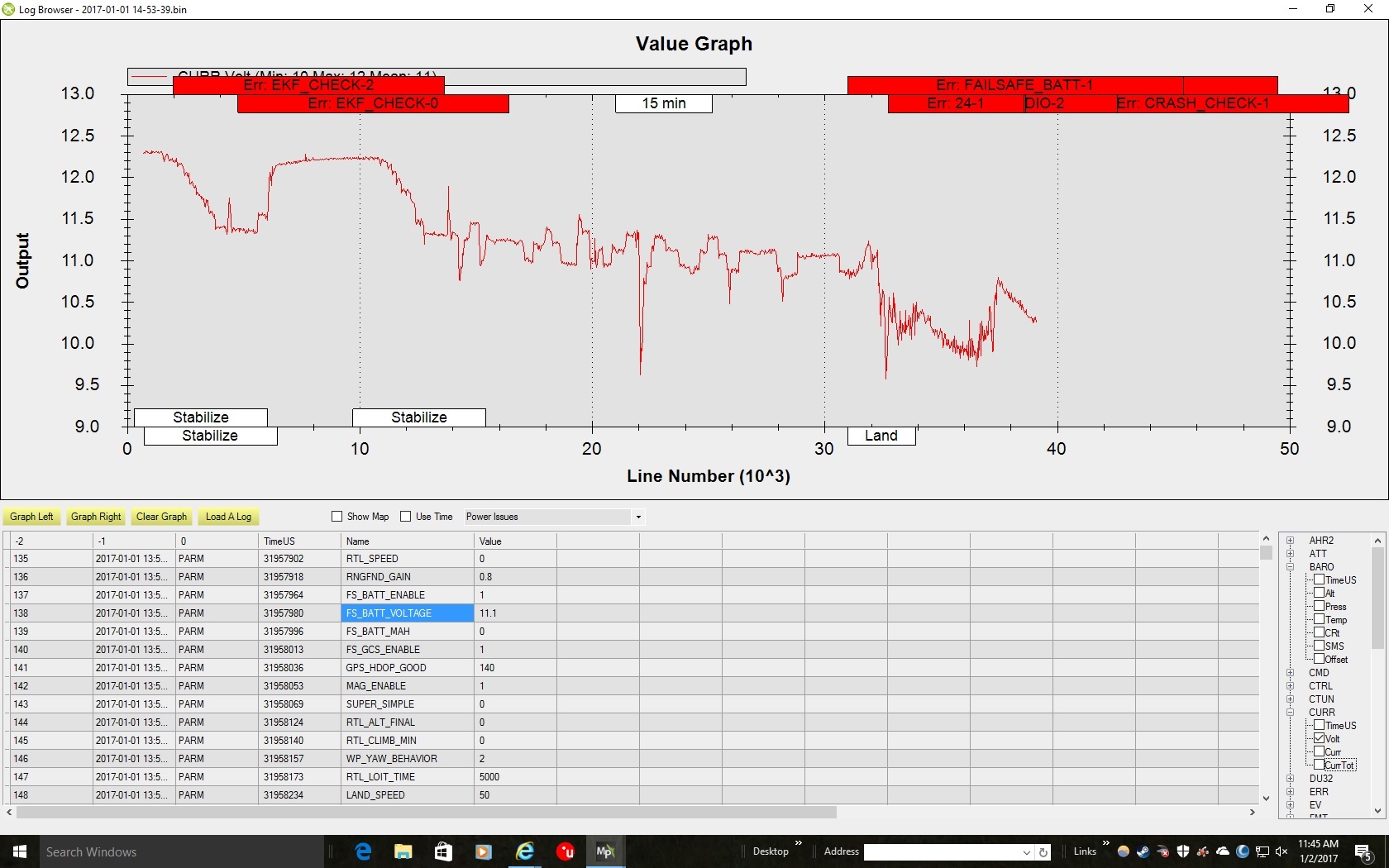
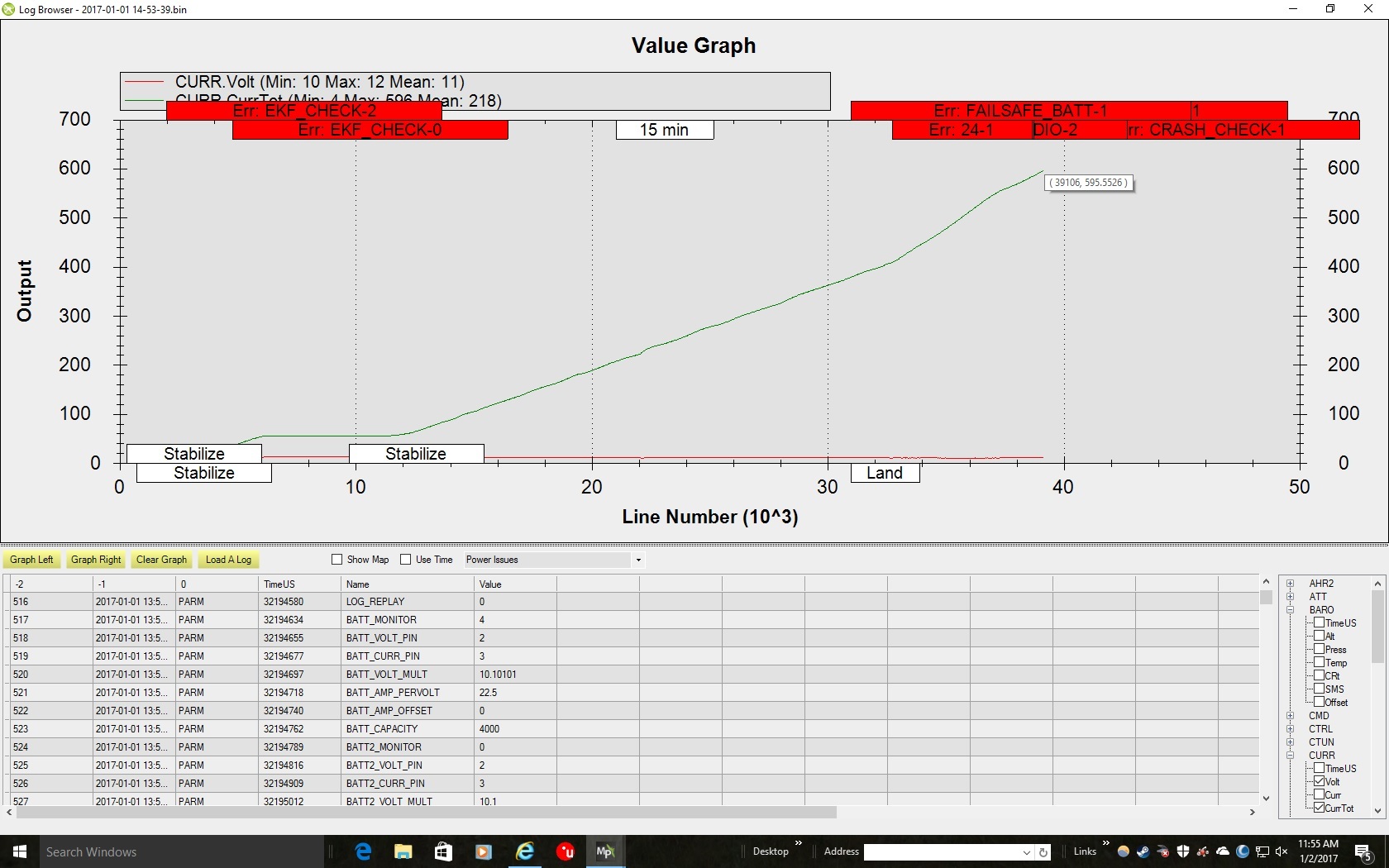
So I repaired props reset mission planner for correct battery voltage and instead of RTL is set it to land on low battery. Copter in hover about 10’ flight mode was Stabilize. I heard low battery alarm again from Pixhawk after about 5 min. of heovering lost all control copter tilted and flew into the ground. Motors still trying to run!
- Took the quad over and hooked to laptop it was in failsafe mode
- Battery voltage was 11.81 - it took about 1400MAH to fully charge…
- I am still learning so I am having trouble graphing
- Radio is set up for no pulses on failsafe
- I see IMU mismatch warning in the file but still researching
-Inside when hooked up to laptop I get EKF occasionally but again still researching and not sure it’s relevant inside the house. - Outside with laptop hooked up I have GPS 3D fix and all seems normal
Update after more research and working with the log files I am understanding them better just to clarify a couple points the spikes you see in the log files are my poor landings!!! Still trying to understand the errors and what is causing the problem
Log Analysis and files below
Thanks again for any help.
Log File C:\Users\Owner\AppData\Local\Temp\tmp1E6B.tmp.log
Size (kb) 3167.474609375
No of lines 39257
Duration 0:15:58
Vehicletype ArduCopter
Firmware Version V3.4.2
Firmware Hash 6076bdfc
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = GOOD -
Test: Compass = WARN - Moderate change in mag_field (25.69%)
Max mag field length (639.59) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERRs found: FS_THR FS_BATT CRASH
Test: GPS = GOOD -
Test: IMU Mismatch = WARN - Check vibration or accelerometer calibration. (Mismatch: 1.09, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1567, 1543, 1531, 1493]
Average motor output = 1533
Difference between min and max motor averages = 74
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = GOOD -
2017-01-01 14-53-39.bin (1.4 MB)
2017-01-01 14-53-39.log (3.1 MB)