We have a 250mm FPV racing quad frame with pixracer FC and can not get it to hover. Quad arms and motors spin at idle without issue. If you give a little throttle quad shoots up quickly in altitude and violently oscillates back and forth in roll. It usually gets up to about 5-7 ft before I cut the throttle and it flips.
Here are a couple failed test flights
Flight Test 1
Flight Test 2
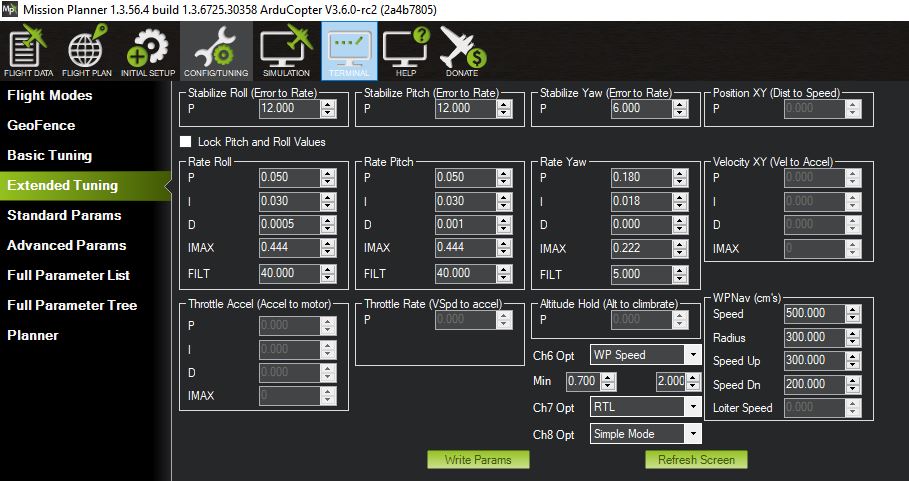
I have messed with the esc protocol, tried normal, oneshot125, all of which are supported on my escs. Tried many esc calibrations. changed the basic tuning sliders, messed with some of the roll and throttle PID’s. No luck at all. I am new to arducopter and feel I am missing something simple?
We put the pixracer FC on another frame we have and it flew fine, it was a little sluggish but it would at least fly.
Quad Flying on larger frame
We also swapped out the pixracer FC for a betaflight f4 FC and the quad flew fine.
The motors also do not respond quickly to throttle commands and when I take throttle back to idle there is a good .5sec to 1 sec delay in the motors actually slowing down. Here are a few videos depicting that behavior.
Motor Test 1
Motor Test 2
Quad Spec:
Flight Controller: Pixracer running arducopter 3.5.5
ESC: T-motor F45A 45A Blheli_S 2-6S Brushless ESC running BLHeli_S
Motors: T-motor F40 II kv2600
My best guess is it is compatibility issue with the esc’s and FC? or ESC firmware?
If there is anything I left out, just let me know.
Anyone got any ideas on what I am doing wrong??