please help me find the cause of today’s crash. I have build a large drone (propellers 22") with top class components such as: Cube Orange+, T-motor 605-X (Integrated Propulsion System) with Alpha 60A HV ESC and MN605-S motors and Mauch power supply. I set all the initial parameters according to the Initial parameters tab with small exceptions:
MOT_THST_EXPO=0.4
MOT_PWM_MIN=1100
MOT_PWM_MAX=1940
I have take off in AltHold mode. Immediately after takeoff and gaining height, the drone behaved very unstable, did not respond to channels, especially to Throttle. I tried to put it on the ground, but with no reaction, until it hit a tree…
I think vibrations are a big factor - you’ll have to see what you can do to address that.
One of the barometers is suffering badly from prop wash.
Set BARO_PRIMARY,1
to use the one that is working much better.
I think the baro issue is why AltHold throttle didnt respond as it should.
Go for Stabilise mode if you ever get anything strange, then you have full control - just dont have the throttle fully down when you select Stabilise mode.
You can set these for the next test flight when you get it flying again, provided you’ve addressed the vibrations. they will help with being able to achieve a good tune and the best PIDs, but they wont work miracles by themselves.
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 // set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.25
INS_HNTCH_FREQ,40
INS_HNTCH_BW,20
INS_HNTCH_FM_RAT,0.7
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.7
PSC_ACCZ_P,0.35
Try to get a couple of meters altitude so there’s not so much prop wash and ground effects.
If vibrations are improved and stability is good then set ATC_THR_MIX_MAN,0.5
I would also set
BRD_BOOT_DELAY,3000
GPS_GNSS_MODE,5
to give the GNSS unit the best chance of working reliably, but I dont think it was a factor in your crash.
I can’t influence the vibrations, the propellers are well balanced. I tested the balance of the propellers using Motor Test. The only thing I can do is mount the FC on foam pads as I had my old Holybro Pixhawk 4 mounted. The Orange Cube+ has anti-vibration protection in the cube, but apparently it doesn’t work as it should…
As for the barometer, it may be a hardware fault, not a software one, maybe I should complain about the FC. I do not hide that such crashes are very expensive.
I will try the settings you provided in the near future.
For me, the strangest thing was that the drone did not want to descend to the ground.
I remember when I did the first drone flight on another Holybro Pixhawk 4 flight controller and there was no problem, and the size of the drone was similar.
The Cube Orange is one of the best autopilots on the market and is used in many commercial aircraft. The vibrations and barometer issues you see are definitely a design issue of the aircraft and not the autopilot itself. Don’t shift blame just because you don’t understand the issue.
In extreme scenarios, you may need to damp the flight controller. But 99% of the time it is due to wiring in tension, unbalanced propellers/motors, or a weak airframe.
Also - please maiden in stabilize. Had you been in stabilize mode - the aircraft would have responded directly to throttle and you would have been able to save the aircraft.
I don’t think vibration and barometer are the cause of the crash. The vibration was caused by the instability of the drone in the air. With the current configuration shown in the photo, the drone is not equipped with a gimbal and a camera. The motors I use are MN605-S 170kV + 22" propellers. With a weight of 10.5kg (1.75kg per motor) they have a huge power reserve. The drone lifted off at 1300-1400us PWM.
MOT_SPIN_MIN parameter is set to 0.13. So the motors get a signal of about 1200us PWM in flight.
The instructions show that: Setting MOT_SPIN_MIN even higher than recommended above is acceptable if we want to account for voltage drop of the battery, but setting it too high reduces the lower range of the motors which reduces control which could be important, especially on powerful copters with a low hover throttle.
It seems to me that the MOT_SPIN_MIN parameter is set too high with this configuration (10.5 kg), which meant that I could not land despite the throttle at min.
According to the process of setting this parameter in the manual, the value should be set to 0.10 because in Motor Test motors rotate at 5%:
set the MOT_SPIN_ARM parameter to (the percentage discovered above + 2%) / 100. I.e. if you found the deadzone of the ESCs was 7%, set MOT_SPIN_ARM to 0.09 (i.e (7 + 2) / 100).
set the MOT_SPIN_MIN parameter to at least 0.03 higher than MOT_SPIN_ARM. i.e. if MOT_SPIN_ARM was 0.09, set MOT_SPIN_MIN is 0.12.
The question is whether the value of 0.1 is enough to counteract external forces, e.g. during a downward flight?
I grant you that the vibrations wont be the cause - I guess the actual flight is so short I mistook the vibrations of the oscillations to be the cause instead of the effect. The vibrations are still more than they should be just because of oscillations though - propwash might be a problem when pitching and rolling.
I still dont quite understand the log and flight - it looks like the copter sat armed for about 10 seconds before attempting takeoff, yet there’s a couple of meters of movement on the map. Then when motor outputs ramped up (flight?) for about another 10 seconds or more it looks like there is about 30m to 50m of movement on the map. If the copter is so out of control it quickly travelled that far, then probably add some dummy payload to get motor outputs and hover throttle under control.
It’s looking like basic PIDs are a problem. You will have to follow the tuning guide to manually reduce PIDs until the copter is stable enough to fly.
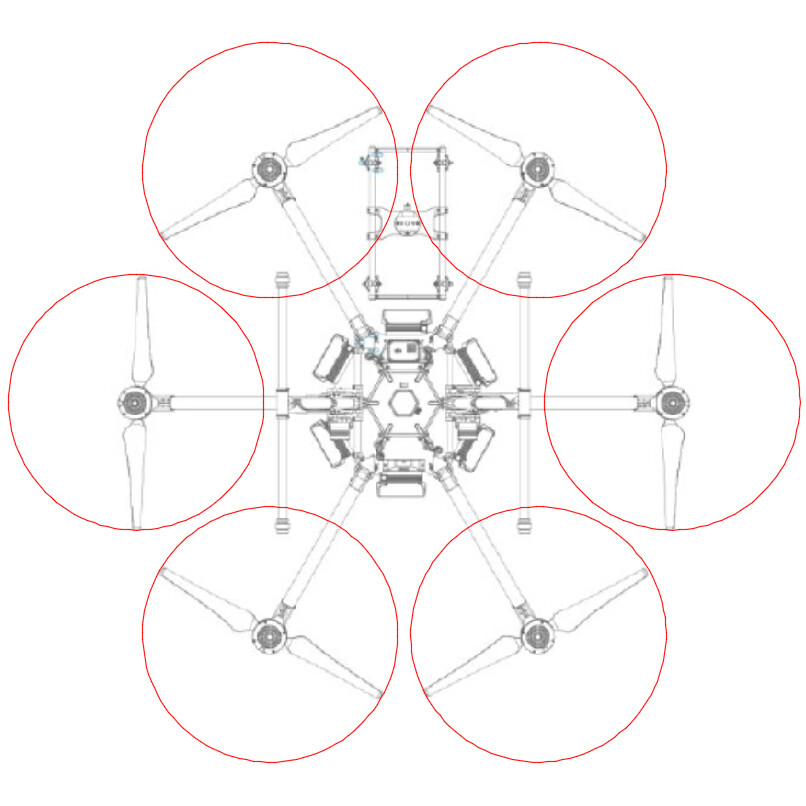
To me is seems those prop tips are going to be very close, I’m not sure what effect that would have but I suspect it will be an adverse affect. My non-mathmatical non-expert suspicions are you should have about 4 inches between prop tips of 22inch props. Consider going down a size in props, it might not reduce your payload capacity as much as you think, and will probably improve stability and ease of tuning.
MOT_SPIN_MIN could probably go down to 0.12 , which is not much difference. I dont think that’s a big problem at this stage. After you’ve done tuning you can test descents and decide if MOT_SPIN_MIN needs to change - you dont want motors to stall during descent or wind gusts.
Your MOT params all look correct at this stage.
If you have a spring-centered throttle then set PILOT_THR_BHV,1 , or I use 7 for this.
You would have to use Stabilise mode for the next tests instead of AltHold at least until there’s basic stability.
Definitely just use Stabilise mode if you are doing any tests or arming and disarming before takeoff. If you are going to use AltHold or Loiter you would need to arm and positively takeoff and get up away from the ground, at least a couple of meters altitude.
EDIT
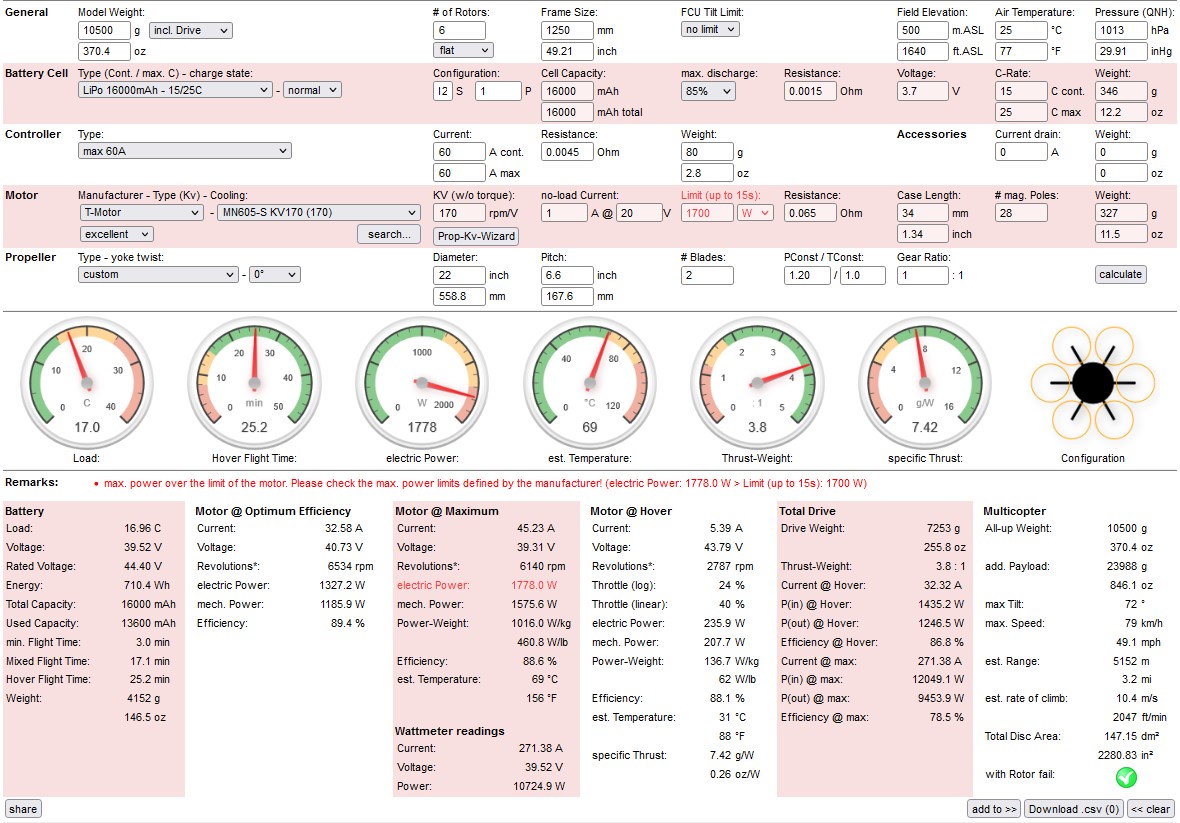
Throwing some things in ecalc those 22inch props with those motors and 12S battery, and 10.5kg all up weight - give some crazy thrust to weight ratio and also the motors are over-power and over-temperature.
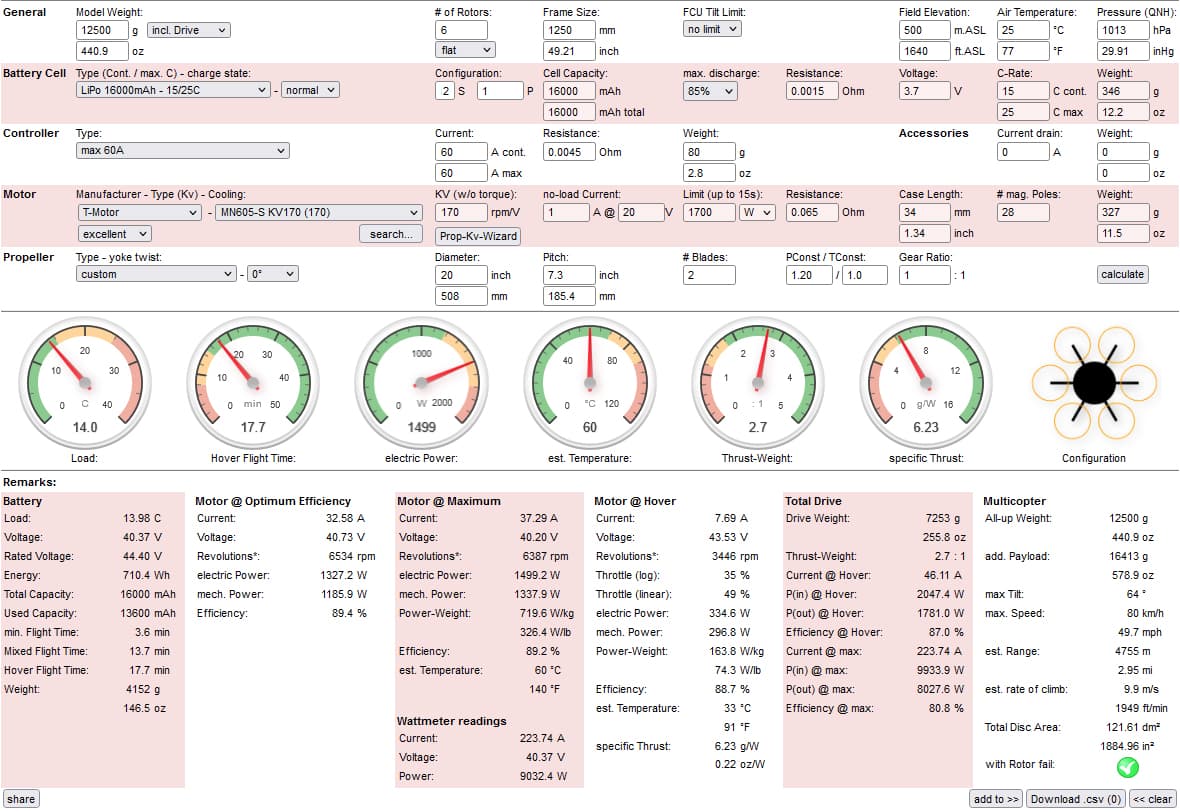
If you changed to 18inch props they give a thrust:weight ratio of 2.2 so that’s quite good, and only a small drop in flight time. The 20inch props are probably the best with T:W 2.8 and best flight time without killing the motors.
What is your expected payload?
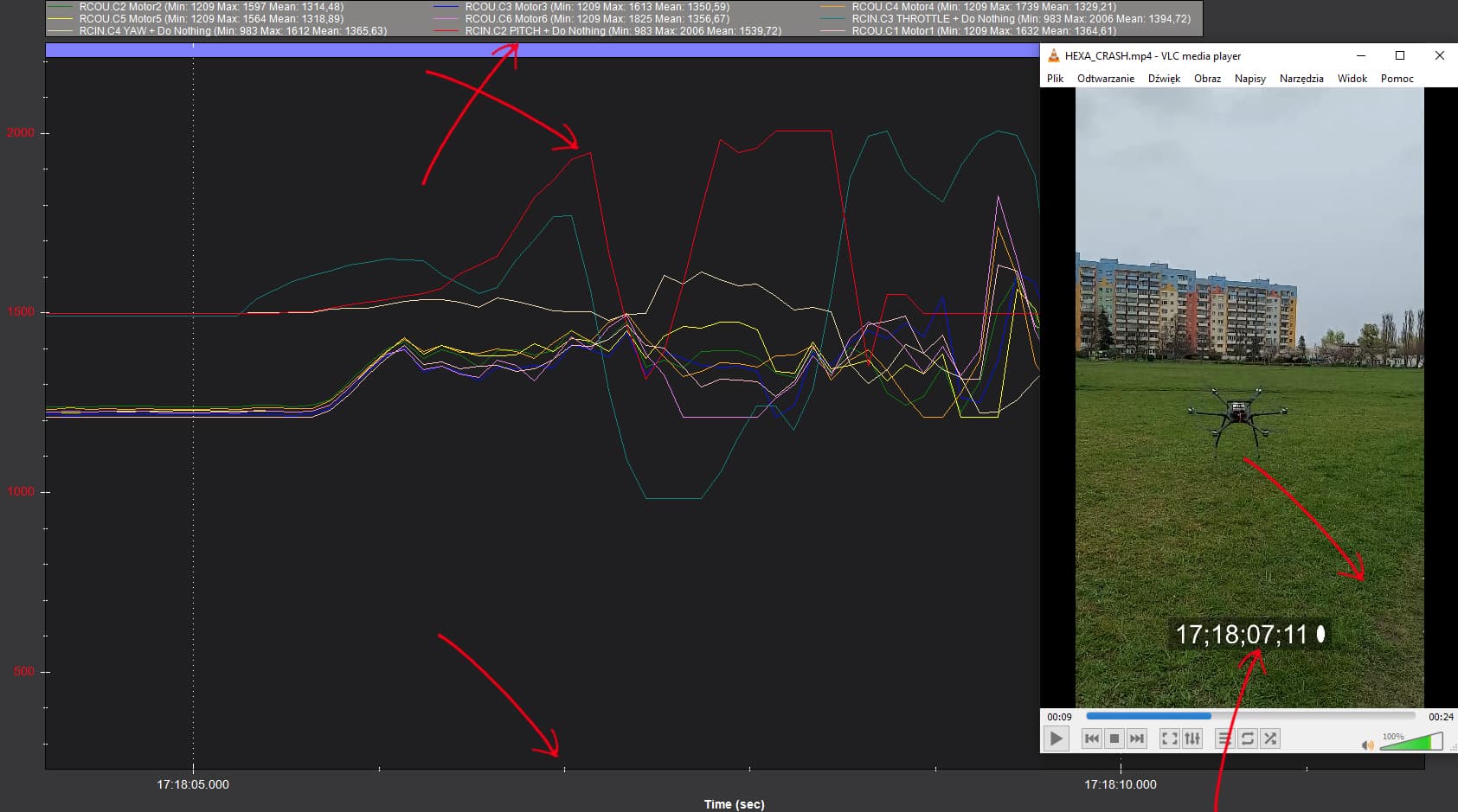
I am posting a recording where you can see that the drone started flying in an unknown direction right after takeoff. I still can’t figure out why it happened. I had seconds to react, so I kept the throttle at min. to land, but no reaction. I added the real time on the recording, so you can easily read the place on the graph in MP. Below is the download link:
I analyzed the distance of the propeller tips in similar drone DJI M600, there is an inch of distance between the propellers. I have two inches in my drone. I guess if DJI designed it, it doesn’t really matter. I attach a drawing of M600 with 21" propellers:
I would like to set the PID values, but for now I need to get a stable flight to run Autotune.
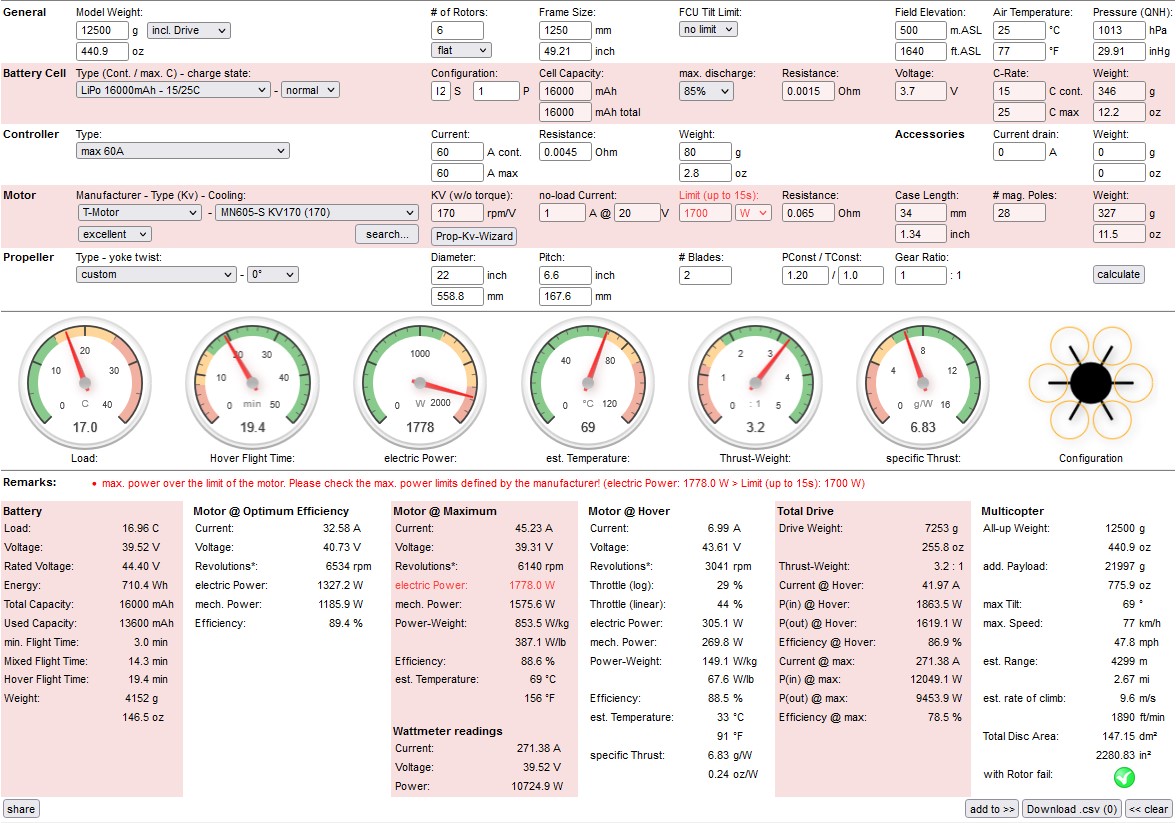
It seems to me that the best option is to lower the parameter MOT_SPIN_MIN = 0.11/0.12 and add a 2kg weight to simulate the gimbal and the camera. I would also set the PID values with a take-off weight of 12.5 kg. My design assumption was to create a drone with a large reserve of power that allows to carry a wide range of equipment into the air for example: lidar, camera, etc., while maintaining the longest flight time that will be needed to perform photogrammetry flights.
Below there are two my configurations: 10.5 kg and 12.5 kg:
If 12.5kg is going to be your maximum take off weight (with payload) then there is no need to go for over 3:1 T:W ratio at that weight. The electric power is way over spec for maximum throttle, and you can think you wont use it, but you will if the copter ever has to fight against wind or ascend at any reasonable rate.
You would do better to aim for closer 2:1 at the maximum take off weight.
And at those high T:W ratios you will have trouble with stability and descent, especially without the maximum payload fitted. I the motors and props are running at near minimum RPM they will be more susceptible to desyncs too.
I dont think it is a fault. Some baros end up more sensitive than other depending on air flow and where they are mounted. Just change to the second baro as the primary.
Set all the other parameters I recommended too, and be sure to start the next test in Stabilise and only switch to AltHold if takeoff and attitude control is working well.
Yup - just did some quick calculations and this aircraft is severely overpowered.
It has a 3.5:1 T:W ratio when loaded at 12.5KG and the battery is near dead at 42V (3.5V/cell). I would highly recommend throwing some larger batteries on board - on downgrading to the MN6007-160KV with 22" propellers. Swapping over to that propulsion system will make the aircraft slightly lighter, easier to tune, and more efficient (according to the propulsion tables given by T-Motor)!
I can see it now. So something is messed up. I recommend you delete everything and start fresh. don’t do any tuning until you get a decent liftoff the stock pid sould get you in the air. for bigger frames you need to comand the power. fly at your own risk as you need to learn on a smaller rig. I would not use them motors and try some Gartt 320 kv a quarter of the price and possibly lighter run 18" prop for now to reduce power. Also forget about e calc that’s a odd program and in my option not worth the time to program.
I’m analyzing my first flight with a new drone again and I think I’ve figured out what happened. According to me, I had an inverted PITCH channel. I don’t know why, but when I assembled my first drone two years ago, it was also the same - the PITCH channel was inverted. The screen shows that after takeoff I instinctively wanted to fly forward, but the drone flew backwards. Since I had little space and I was confused by the fact that the drone does not descend at min throttle, or it descends very slowly, what you can see in the recording happened.
Recently, I’ve been practicing FPV flights a lot on the simulator and developed a forward flight reflex right after takeoff, instead of observing the drone’s behavior during hovering.
What can cause inverted PITCH channel after uploading fresh firmware, did you have that too?
I use mission planner RC2. One thing its always good to check it with a little power to see it you have the right tilt going away from the pilot on the smaller crafts. the big ones are prone to tilt over so be very careful.