The recommended parameter values have been adjusted according to all tuning procedures.
For “MOT_THST_EXPO”, 0.4 looks better than 0.2.
I modified my PID in various ways
“Auto Tune: Failing to level, please tune manually”
Auto-tune does not proceed.
If there is no problem with the parameters, should we suspect a hardware problem?
Here’s my log and the latest parameter values. Param
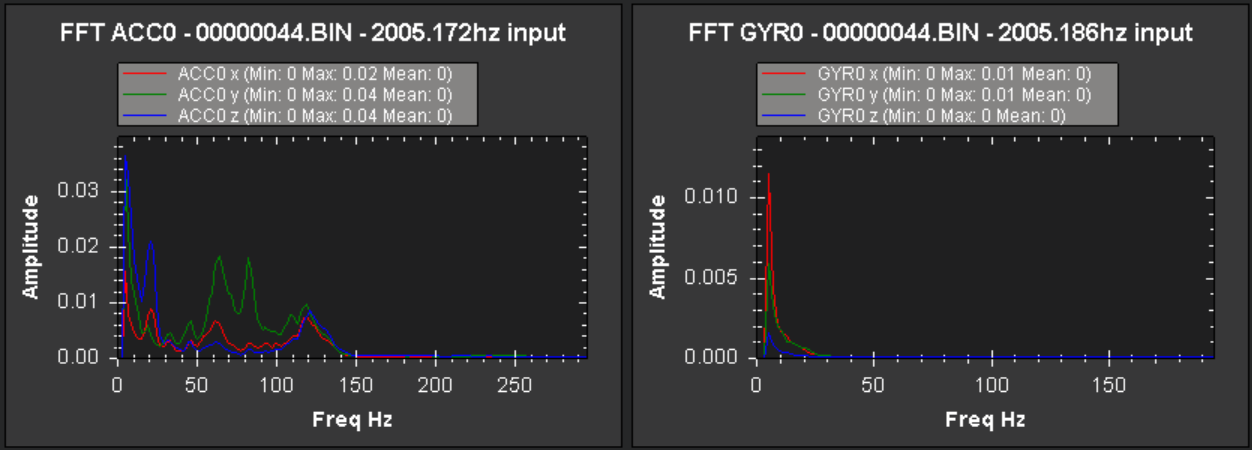
I think INS_HNTCH_BW should be about 40, not 125.
You could try AUTOTUNE_AGGR,0.075 too, it might work better with those T-Motor ESCs
These params worked OK as a starting point on a large hex with T-Motors and ESCs
Pick and choose what you want
ATC_ACCEL_P_MAX,23400
ATC_ACCEL_R_MAX,23400
ATC_ACCEL_Y_MAX,9900
ATC_ANG_PIT_P,3
ATC_ANG_RLL_P,3
ATC_ANG_YAW_P,3
ATC_INPUT_TC,0.22
ATC_RAT_PIT_D,0.036
ATC_RAT_PIT_I,0.25
ATC_RAT_PIT_P,0.35
ATC_RAT_RLL_D,0.036
ATC_RAT_RLL_I,0.25
ATC_RAT_RLL_P,0.35
ATC_RAT_YAW_D,0.007
ATC_RAT_YAW_I,0.02
ATC_RAT_YAW_P,0.41
ATC_RATE_P_MAX,720
ATC_RATE_R_MAX,720
ATC_RATE_Y_MAX,720
the accel_p_max values are not critical, it doesnt hurt to be a bit lower with bigger aircraft. Autotune will sort it out, and you can lower them anyway to suit payloads.
The values I gave are just ones we started with on a big unstable hex.
these ANG_P values are quite low, and the RAT_P and _I values are quite different to compensate.
Leonard Hall would tell me I’m completely wrong no doubt, but simplistically I like to think of it like this:
the ANG (angle) values are about your frame size
the RAT (rate) values are about the ESC/Motor control
we dont often use the ATC_RATE_ MAX values, but for a big aircraft it can be very appropriate to limit the rate of movement (not the acceleration). Experiment a bit or do some maths to find what suits your application
I think I need to study more deeply about such a difficult relationship.
Is there a risk that the plane will crash if we experiment at the starting point above?
If there is no big problem, I will bring the test results within an hour.
After completing the flight test, the motor noise was reduced and softened.
However, there still seems to be some problems.
What kind of mege variable should be modified to make a softer sound?
It still feels a little loose, but if you raise the P and I values, it will vibrate just before takeoff from the ground.