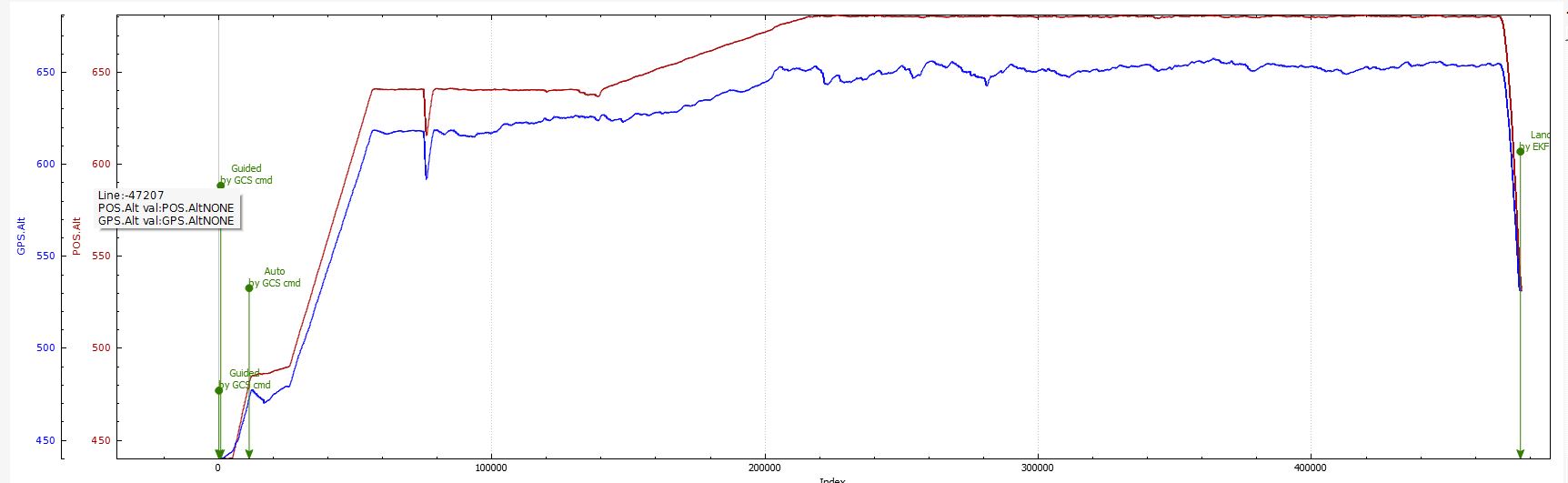
I’ve flown a mission with a 200m climb close to a small mountain upwards and after the flight I compared the POS alt vs GPS alt since I thought that it flew very close to the ground…
And surely the difference is huge. In certain parts more then 25m!
Is this because of baro drift? In arduplane I remebere using the alt_mix parameter but this does not exist in arducopter.
What Can I do to prevent such a huge deviation?
Likely due to GPS inaccuracy, not the baro. GPS is notoriously inaccurate in height estimates. I have had this problem with helicopters on high speed flights making lot of turns.
There is a patch in 3.6-dev for this to set the EKF height origin using baro, but it is not in 3.5 yet. I built my custom helicopter code with the patch on 3.5 and have not had the problem since.
I’m still struggling with this problem. Had a close call due to this problem wehre pos Alt was 16m off the GPS altitude…
Its definitely the problem of the pos alt estimator so how do you guys cope with that?
It’s fixed in 3.6 and when Paul did the updates he mistakenly thought it went into the 3.5 backports but it didn’t. Now that 3.6-rc1 is out for testing it is unlikely the EKF updates are going to be backported to 3.5 unless you do it yourself. I have code for it that will build for multicopter, but I have only done builds for heli’s, as I am a heli developer so that’s what I focus on.
If you want to clone that repo and do a build on it for multicopter without flying beta firmware it will fix your problem. That repo is Copter 3.5.5 with many updates in it for helicopters, and including the EKF updates that are in 3.6 for all Copter builds, since they all use the same EKF.