I have a 2019 Cube and have not flown the drone for several years. I now have to have it working for it to be seen in a documentary shoot in a week. It was flying fine until I updated the Cube firmware and MP. I see that there were issues with the 2019 Cube but from what I can tell they should be resolved with the latest software. I keep getting “IOMCU is unhealthy” but I am not experienced enough to track down the problem. I am willing to pay someone serious money to walk me through a successful fix since I am in a time constraint.
Unsure if any of these will help or fix the problem, but we can try…
Is it a Cube Black or Cube Orange?
What firmware have you installed?
Provide a screen shot of the Messages tab from MissionPlanner
Do the bootloader update
Set LOG_DISARMED = 1 and provide a .bin log file , set it back to 0 afterwards.
This log file will tell us a lot of things.
In Config / Full Parameter List, Save the parameters to a file for safe keeping.
I would load stable Rover firmware (rather than just resetting params to defaults), which will produce a whole bunch of warnings about many things not configured or calibrated.
See if the same IOMCU Unhealthy message is present.
If not reload the Copter firmware and we can work on putting back the required settings - hint: don’t just reload all the saved parameters from earlier.
Let us know what happens and we will try to work through each step.
OK, reload the copter firmware then run through the mandatory calibrations first - accel, RC calibrations and so on…
Be sure to set the frame type and reboot before anything else.
What ESC’s and motors and props do you have?
Is your throttle stick spring-centred ?
Ensure that the battery monitor is working for at least voltage, and preferably current too.
Then connect to MissionPlanner / Setup / Mandatory / Initial Parameters
Enter your prop size and battery cell count (for normal Lipos, or pick the chemistry type of your battery)
Select the “Suggested” check box.
Click on the button to write everything to the flight controller, a comparison window will come up - accept everything it offers!
Now set these in the Full Parameter list, some I got from your log file, so if that was not suitable for flight then ignore the ATC_RAT ones.
INS_HNTCH_ENABLE,1 // write this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.17
INS_HNTCH_FREQ,90
INS_HNTCH_BW,45
INS_HNTCH_FM_RAT,0.7
Then do a test flight starting in Stabilise mode
Move onto AltHold if everything is going OK
I just realised your motors were in a non-standard order. Did you reload those servo functions?
SERVO1_FUNCTION 35
SERVO2_FUNCTION 36
SERVO3_FUNCTION 33
SERVO4_FUNCTION 34
Only 4 motors set but the frame was set for hex
Use the MissionPlanner motor test extensively before flying.
No idea about that, I am not really familiar with everything we are doing. You are saying I should reload the params from my original setup?
I tried to fly it but it took almost full throttle to just start to get off the ground. It wanted to tip over so that may be from the improper motor setup.
bin file:
OK, in that log you’ve got it set as a Hex. Good.
Check in the Setup / Mandatory / Servo Output screen to make sure the correct motors are assigned to the correct Main Output (servo) connectors - I’m just showing the defaults here.
If you move a motor function in that servo output screen you need to reboot the FC for it to take effect.
It should just be a matter of getting that Motor1, Motor2, Motor3… order correctly lined up with the servo/MainOut connectors and the way they are physically connected, since nothing should have physically changed.
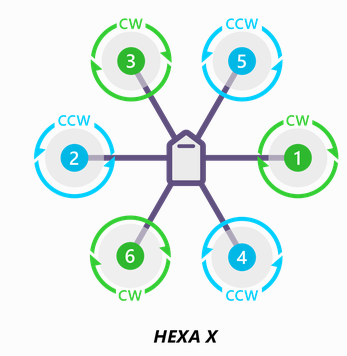
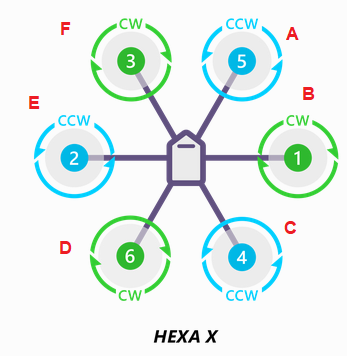
Then use the Optional Hardware / Motor Test screen to verify operation of correct motors and their spin. When you press the button to test motor A it should always operate the motor I’ve labelled as A, and so on around the clock - regardless of the motor numbering!
So if you press to operate Motor A and a different motor spins, then physically move the servo connectors until pressing A always operates the motor in the A position on my diagram.
The spin directions of the props are a little trickier than setting up a quad, so play close attention to the spin of the props too - and compare with that diagram.
EDIT:
See if you can get the BATT_MONITOR working too. If you are using the “power brick” that came with a Cube Black you should just have to set
BATT_MONITOR,4
and reboot the FC.
You’ll have to run that initial parameters wizard again to set the correct voltage failsafe levels and action.