Hello friends
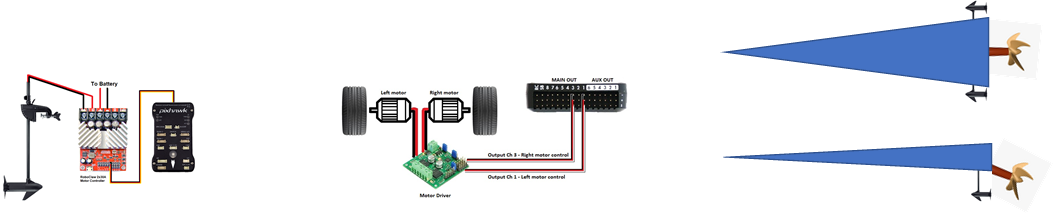
I am working on a boat with 2 brushed motors (controlled by Roboclaw 2x60AHV in the “Sliding Direction” setting by varying the speed / Output RC 1 connected to the drive motor on the left and Output RC 3 connected to the drive motor on the right) .
But those motors are only for direction because I have another main 3-phase 2 Kw motor (for the accelerator) controlled through pwm, by means of a frequency inverter.
The question is whether it is possible to control this boat with a particular parametrization and, if so, which servo output should be connected to the main motor. (I am using Pixhawk)
I am not sure if this is possible or should I modify the firmware and compile another module version of it.
You are free to connect your motors to any servo output you like.
I would try to set one output to throttle and connect the drive motor to it. For the direction motors, you could either set two outputs to steering, but that causes arduboat to use this output like a servo. Servos do not get deactivated, while the vehicle is disarmed. This might be dangerous. This also prevents arduboat from using pivot steering (turning on the spot). The direction motors will be stopped if no steering is required. Another option would be to set the outputs for the direction motors to throttle left and throttle right. With this configuration the direction motors will also propel the boat. This configuration is possible, but not tested, as far as I know. So you have to test yourself if it actually works.
I missed you mentioning the “sliding direction” setting. Do you mean a differential steering mixer? For the configurations I mentioned, you will have to set the Roboclaw to use two independent channels.
Perhaps Boost Throttle would work? It’s in Rover for a Servo out option but Rover is lacking the MOT_BOOST_SCALE parameter to scale Boost thrust with main motors thrust. Hmm…
This is my big question … I have a powerful motor (because the boat is heavy) without direction, only to go forward and back with speed regulation and I also have 2 auxiliary motors to make the turn that even allow me to turn without using the main engine (it’s a feature I need) and I’m not sure how to configure this to work in automatic mode
This is my big question … I have a powerful motor (because the boat is heavy) without direction, only to go forward and back with speed regulation and I also have 2 auxiliary motors to make the turn that even allow me to turn without using the main engine (it’s a feature I need) and I’m not sure how to configure this to work in automatic mode
In any case, the auxiliary motors may also serve to help the main motor when going straight forward or backward, but the main question is whether connecting the auxiliary motors as throttle left and throttle right and the main one as Boost Throttle the system will work well, that is, for example, when you need to turn while driving at low speed to the right or to the left, will the main motor adjust accordingly?
Servo out 2: Throttle left
connect left direction motor
Servo out 3: Throttle right
connect right direction motor
Pros: all motors disarm, turning on the spot for all modes
Cons: mix between conventional and skid steering, untested configuration, might not work as expected.
Option 2:
Servo out 1: Throttle
connect drive motor
Servo out 2: Ground steering
connect left direction motor
Servo out 3: Ground steering
connect right direction motor
Pros: Normal configuration, no mix between conventional and skid steering, should work.
Cons: Direction motors do not disarm, only manual mode will be able to use pivot turning, direction motors do not aid propulsion, “windmilling” creates more drag.
Option 3:
Drive motor as boost motor. I never used this option. It was developed for copters with an additional IC engine or a bigger electric motor. Is it supported in ardurover/boat? Does the boost motor support reverse?
Your project is something I’m also interested in doing…
I also have a dual prop craft set to skid steer with an outboard motor that can be used for additional thrust. I just finished assembling my craft and I’m eager to test!
As was said before, throttle or boost throttle look promising for a craft with smaller direction motors and a larger thrust motor.
Have you had ANY success in the last year doing this?
My only other option would be to add the thrust motor directly to the receiver on a switch to power up when in a faster current.
Hey there, I am in the same “boat” if you will I have a kayak with a 55lbs trolling motor as of right now. My plan was to add 2 waterproof thrusters with built in esc for left right steering. I’ve gotten the build materials and parts. Might I add this is my first delve into drone building but have a solid technical background. I am stuck at the esc to pixhawk connection and which params I need to set. We’re you able to figure it out?
 I have a kayak with a 55lbs trolling motor as of right now. My plan was to add 2 waterproof thrusters with built in esc for left right steering. I’ve gotten the build materials and parts. Might I add this is my first delve into drone building but have a solid technical background. I am stuck at the esc to pixhawk connection and which params I need to set. We’re you able to figure it out?
I have a kayak with a 55lbs trolling motor as of right now. My plan was to add 2 waterproof thrusters with built in esc for left right steering. I’ve gotten the build materials and parts. Might I add this is my first delve into drone building but have a solid technical background. I am stuck at the esc to pixhawk connection and which params I need to set. We’re you able to figure it out?