Hello all, the hexa i am flying with now is 1600mm, around 7kg without payload and 12kg with payload, and it is not stable at the roll axis. What will be the most common issue?
You are right in your suspicion of the PID gains being too far out.
For such a large copter have you adjusted your filter frequencies ?
Might make a big difference.
I tried autotune with a copter that size, once, without adjusting the gyro filters and it just flipped over on about 4th or 5th tuning twitch.
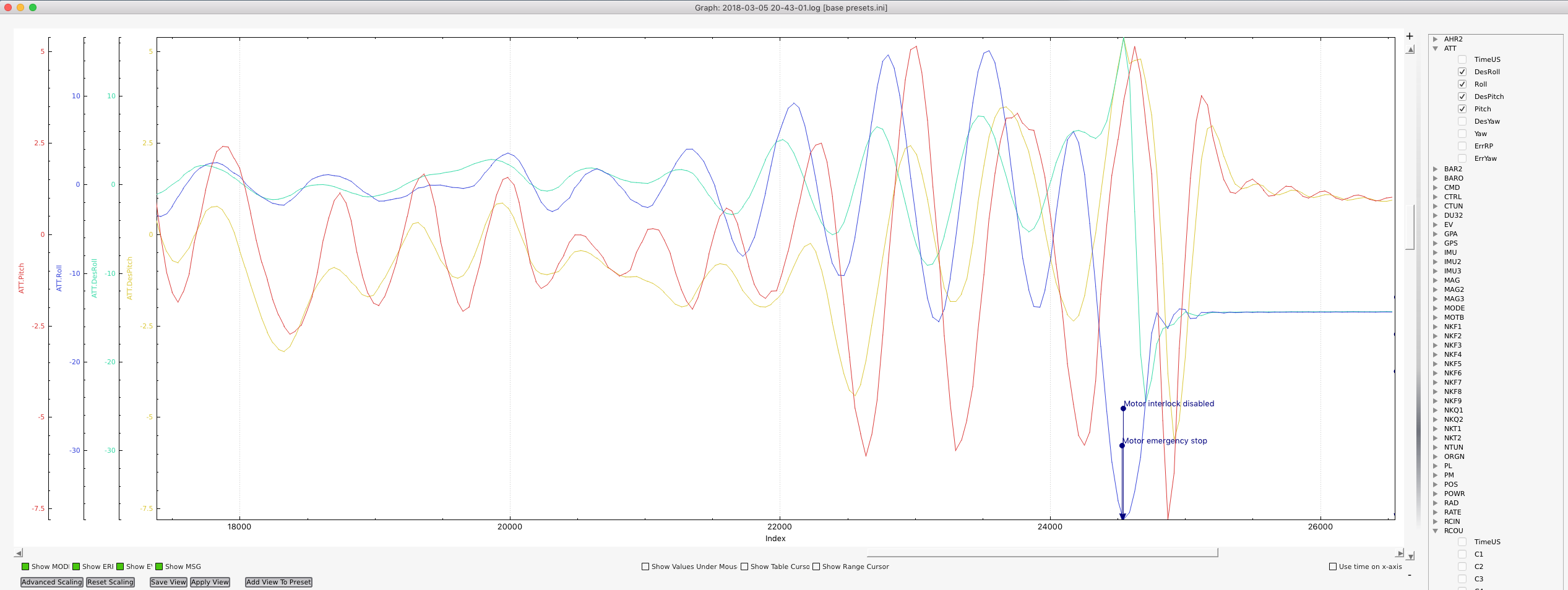
As you can see desired and actual were chasing one another and getting progressively more out of sync.
Have a read of the Autotune section of the Wiki for directions on setting up for large copters so you can get it stable enough to do an autotune.
I just checked my params, and apparently my ATC_RAT_PIT_FILT was 20. I remembered setting it to 10 but maybe I have reset my parameters and thats what lead to this issue.
Thanks for the pointers, I will change the filter to 10 and try altitude hold mode to check for stability