Hi guys,
I would really appreciate your help diagnosing the cause of my quad’s crash.
My .bin file and .tlog file are attached.
https://drive.google.com/file/d/1X57Mn77mg1lnofwr-xRqK3fzLq4yQF5R/view?usp=sharing
2021-02-26 17-39-46.tlog (306.9 KB)
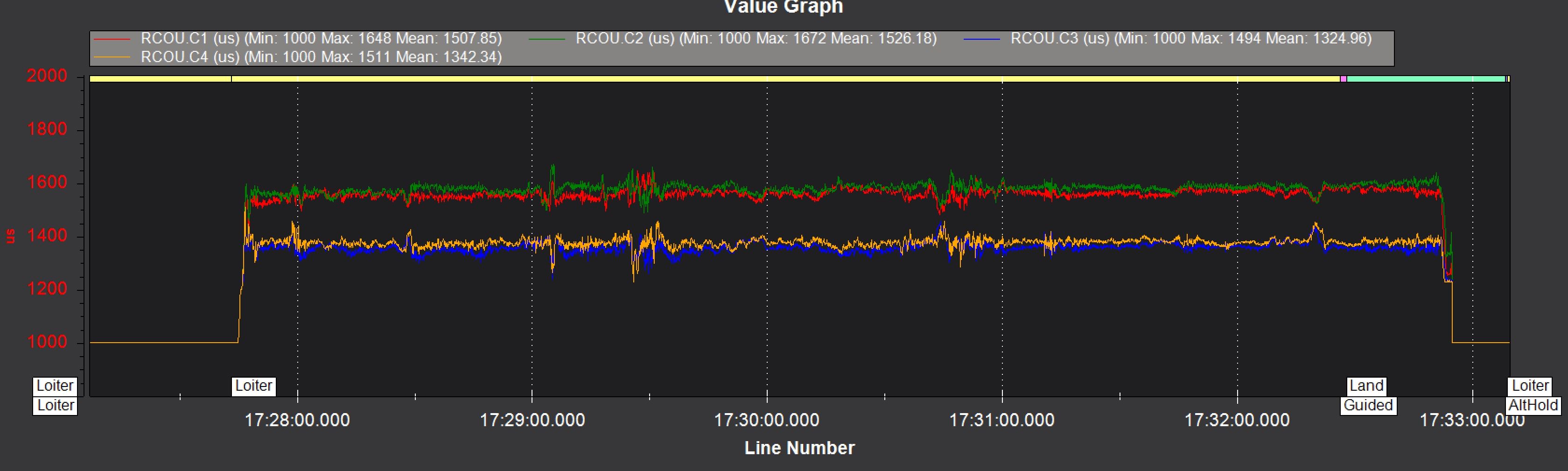
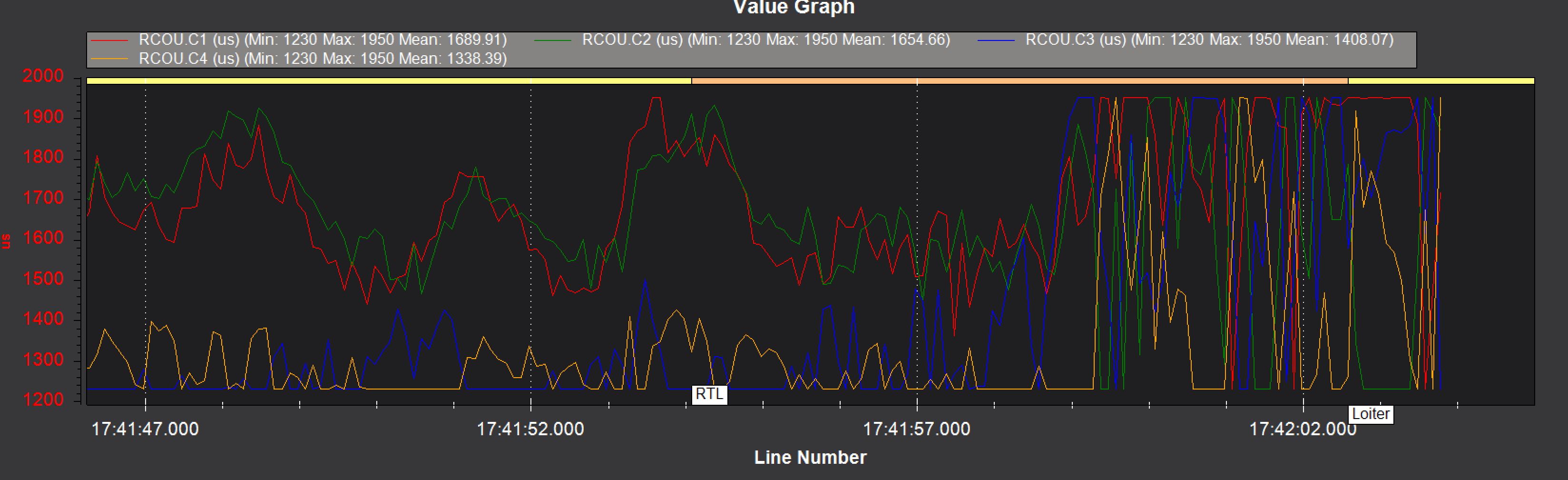
My quad was autotuned 10+ flights ago, and I had not encountered any errors. The quad had been flying decently during this particular flight at low altitudes (<10 meters). Then I increased my height exposing the quad to ~6 m/s wind. A few seconds later, the quad lost attitude control.
For reference, I was running a 15" quadcopter running:
- T-Motor 4012 + Tarot 15" props (I know these aren’t great props…)
- APD 40F3 ESCs
- Tarot 680 Pro frame
- Cube Orange
- Here 3 GPS (single, using its compass as compass1)
- Tattu 6S 6000 mAh
- Raspberry Pi Companion Computer (inactive during crash)
- RFD 900 TXMod
Thank you