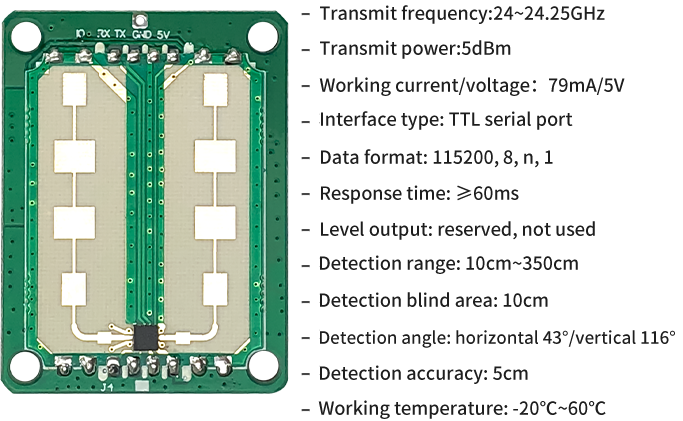
I have been working to get a cheap radar working with ardupilot and I have really liked the specs and price of this HLK-LD303 Doppler radar. its really cheap with a 3m range my plan is to use it on a boat for avoidance, but it might also work as a landing radar.
The main issue with it is that it can only detect objects moving relative to the vehicle, so it’s not ideal for rovers that can stay perfectly still as it won’t display any distances once it’s been too still for too long but for aircraft and boats they should always be moving enough that everything is moving relative to the vehicle, so I think it should be ok for them.
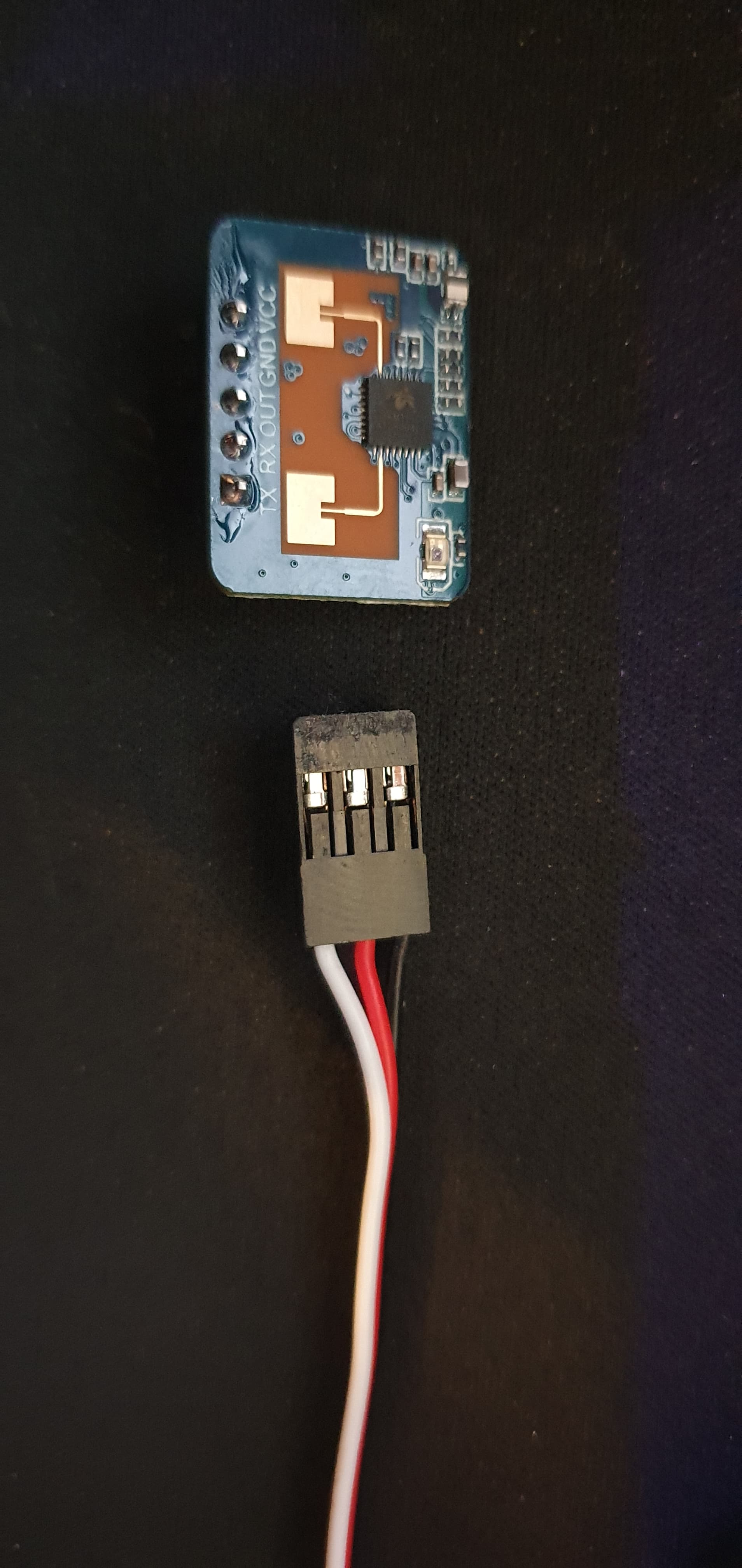
just incase you thought that radar was small…here we have the $3!!! LD2410C its about 1/4 the size and allegedly has up to a 5m range but i havent tested that yet.
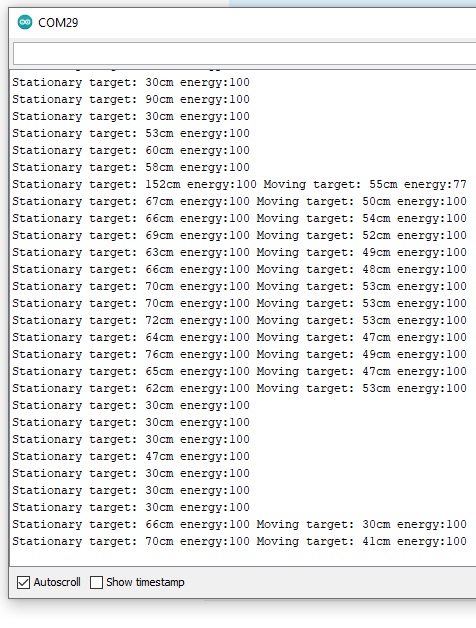
it tracks static and moving targets separately so at the moment its set to show the moving target range if available, if not it falls back to static target range then zero. from what i can tell its surprisingly accurate and high resolution.
I have been doing some testing indoors with the little LD2410C radar, this is me moving my leg around infront of my rover with a VL53L1X lidar as rangefinder 1 and the radar as rangefinder2. I have found the more the target is moving the more accurate the range is especially with smaller objects. im going to take it out in the garden to do some more testing to see how it handles walls and other stationary objects.
Testing the little radar outdoors shows it could pick me up at 5 meters! But only if I’m moving, things like brick walls were pretty much invisible. So I think it’s probably tuned for tracking people. It would be a good addition for specifically avoiding people to do along with a short range lidar.
This seems really interesting, thanks for sharing that.
Cheap radar modules really promising to be used as rangefinders.
The radar concept does not for objects to be moving, AFAIK.
Maybe there is an option on that device that disables the need for movement?
I think its just a limitation of the radar, they continuously transmit and are looking for the Dopper shift to find things moving relative to the radar. it does show static targets also but its far less accurate and shorter range. The test was with the vehicle stationary so it might work better with something thats moving like an aircraft or boat.
AFAIK the object has to have radial velocity.
Could you please do tests flying towards a large obstacle such as a wall or if you can mount the sensor facing downwards ascending and descending at constant velocity like 10, 20, 30… cm/s.
This would be more representative of drone in motion.
You could hold last value for a few seconds if there is no motion signal. It still probably wouldn’t detect steps but at least would provide data that collision avoidance could use to keep away from a wall giving a pilot a bit more time to react.
im going to try mounting it to a servo and rotating the servo to see if keeping the radar moving will keep everything else moving enough that it can track stationary objects.
Unfortunately I don’t have aircraft for testing just rovers.