im doing some more testing now, I think there might be somethign different with the serial ports between the 2 libraries thats causing some issues.
1 Like
the mavlink serial output pin is different, its pin 8 with the new board library.
so you mean that the reciever pin (Rx) on the flight controller should be connected to the pin 8 of the RP2040?
yes, serial ports default to different pins with that library.
Awesome! It works! Now its just a matter of a few days till my parts for a new chassis arrive, and i will be able to build it, mount the lidar on it and make it avoid obstacles! (hopefully) Thank you so much for help and sorry for all misuenderstandings!

1 Like
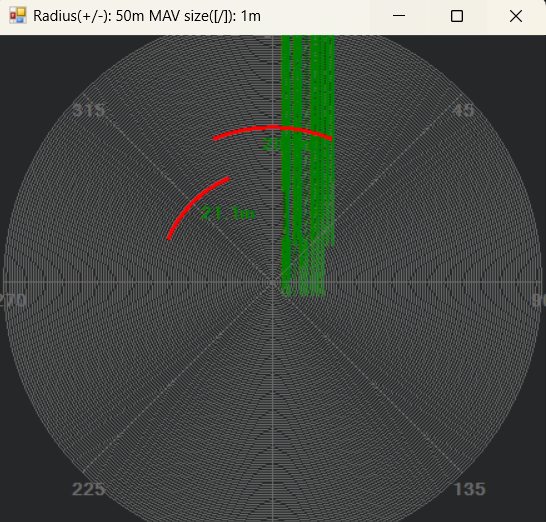
it should be much more stable now, you shouldnt see the red line jumping around and it should be using a fraction of the bandwidth.
I will update it again at some point with it mapping 0-359 to 72 rather than 0-89, it should make it a little more accurate. another idea is to try and set it up as 5x 72 lidar segments but im not sure how it would handle that.
1 Like
awesome! i have a quick question though, is there any way to change the radius of the proximity viewer (like zoom in or zoom out on the radar)? I see that the radius and the MAV size is wrote on top. Is there any way to change the MAV size too?

Not that I have found.
they are down to £10 now
1 Like