I’m having a strange problem with the swashplate operation of my 800 class helicopter, and it’s causing me trouble.
I’m using a Pixcube Orange+ with a 120H3 swash type. It’s a flybarless helicopter.
I’m experiencing this issue when I check the roll axis. After arming and unlocking the interlock, if I apply even the slightest rudder input, servo number 3 activates along with the aileron servos, causing the swashplate to tilt diagonally. Sometimes, the swashplate even moves with rudder input alone.
When I disarm, the swashplate responds correctly to roll inputs, tilting left and right as expected. Also, if I don’t touch the rudder after arming and unlocking, the swashplate operates normally. I’ve tried setting it up with different equipment, but the problem persists.
I suspect this started happening after I updated the firmware to version 4.5.7, but I’m not entirely sure.
Any help would be greatly appreciated.
I’ll explain a little more.
I tried reverting the firmware to V4.5.2, but the swashplate movement did not change.
I flew it as it was.
I felt that the feeling of flying was not different from the feeling I had flown before, with hovering level flight.
It is possible that I was flying in the same condition even before the firmware update.
I am having trouble uploading the log data, so I will upload it as soon as I find a way.
I’m assuming this is in stabilize mode. If it is then that is probably just part of the programming of that mode. I tried it with my heli on the bench and I noticed the same thing. If you switch to acro (make sure acro trainer is turned off) and try a rudder input, you’ll see that there is no inputs to the swashplate. I have flown 4.5 and I haven’t noticed any issues with yaw control affecting the pitch or roll axes in stabilize mode.
After looking through your setup, I did notice that you are not using the rotor speed controller the way it was designed. It appears that you are bypassing all of the protections of the RSC and passing the motor control straight through. You don’t have any servo assigned to HeliRSC. why?
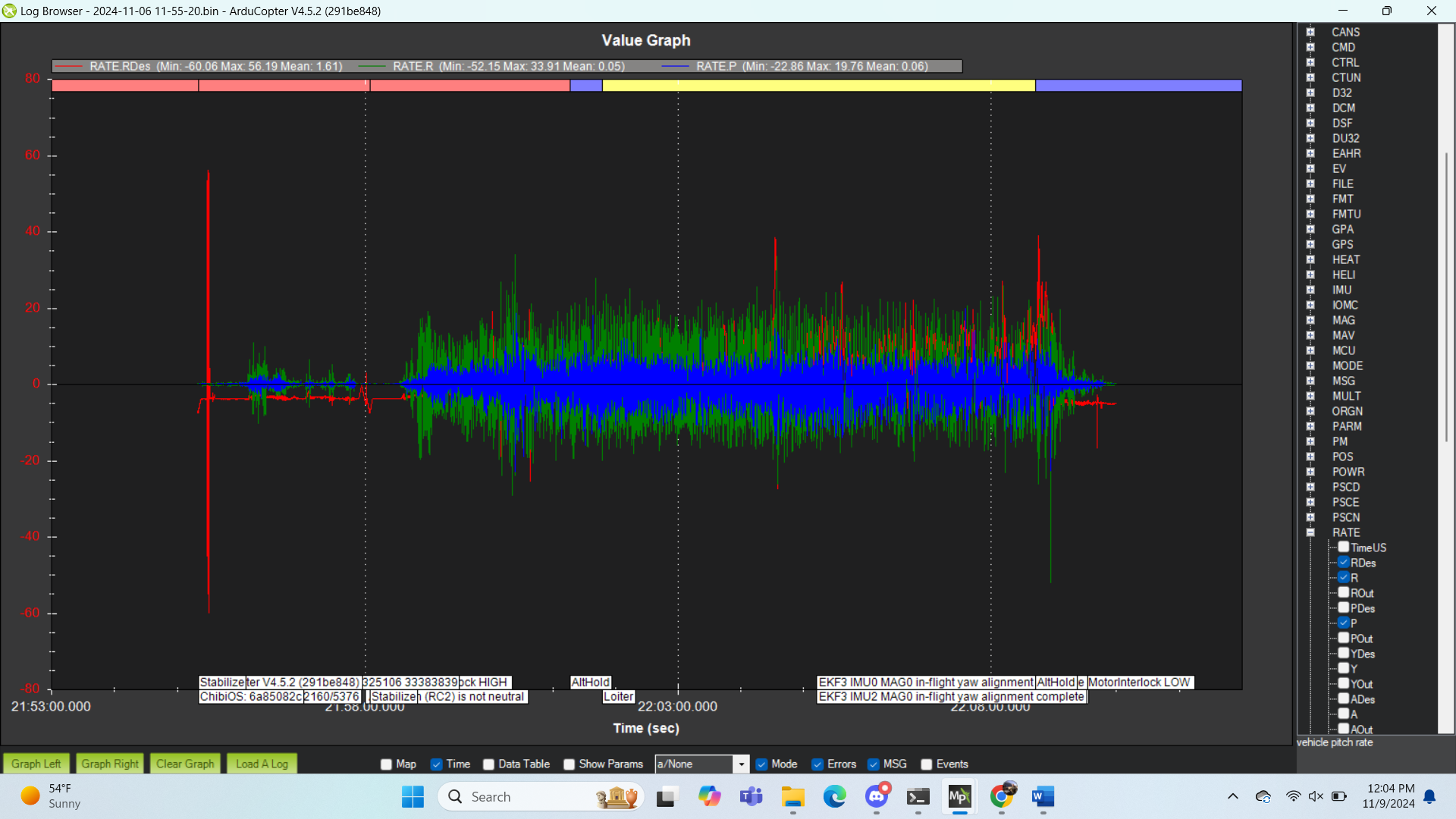
Also you need to address the large vibrations in your gyro signals
I have examined the parameters of the past aircraft as well, but they still exhibited the same behavior. This movement seems to be programmed. It appears that the swashplate exhibits the same movement in both stabilize mode and altitude hold mode. I haven’t tried acro mode yet, but I will give it a try.
This aircraft has a turbine engine, and since the engine’s ECU has a governor function, I am manually operating the rotor speed. CH8 is connected to the throttle input of the ECU. I am using the interlock channel as a trigger for starting the engine.
Thank you for pointing out the vibration issue. I have been concerned about the vibrations for a while now, and I would like to take my time to adjust them carefully.
Yes that would be true since althold is just stabilize mode with a altitude hold command in the vertical axis rather than collective control
This is still not the correct set up of the RSC. @Ferrosan has experience in setting up turbine engines using the RSC. Hopefully he can chime in to help.
I’m using the Xicoy X45 engine for my model aircraft. I’m currently controlling it manually, including startup, using the 8CH on my transmitter.
I’m interested in learning about any recommended connection methods or best practices for this setup. If you have any suggestions or advice, I would greatly appreciate it.
Thank you for your time and assistance.
2024年11月12日(火) 21:15 Ferruccio Vicari via ArduPilot Discourse <noreply@ardupilot.org>:
I’d suggest to use H_RSC_MODE 2, since you mentioned you are using the internal ECU governor of the turbine.
Set H_RSC_IDLE to 20 and DISARM_DELAY to 0.
Set H_RSC_SETPOINT temporarily to 100, this is needed only for ECU learning of “full stick” position.
Furthermore set H_RSC_RAMP_TIME and H_RSC_RUNUP_TIME appropriately to guarantee a smooth acceleration of the engine from idle to flight regime (aroundt 15s should be fine).
Now you can do the ECU RC learning procedure:
the “stick down/ trim down” position will require you to arm the aircraft (you can monitor in real time on your GCU the pwm value-around 1200)
the “stick up/trim up” will require you to switch motor interlock on(ch8 on your radio), wait for the throttle output to complete the ramp up time (you can monitor in real time on your GCU the pwm value-around 2000)
the “stick down/trim down” will require you to disarm the aircraft (on the GCU you should read pwm value 1000).
Then you should set H_RSC_SETPOINT back around the value that gives the desired headspeed with small or no collective load.
Set H_RSC_CRITICAL to be below H_RSC_SETPOINT value.
For initiating engine startup sequence you can use the aux function available on the autopilot:
set RCx_OPTION to 161, flicking the corresponding aux switch on your radio will initiate the startup.
Hopefully this helps.
I apologize for the late reply.
Thank you very much for your helpful advice.
I tried various things, but in my environment, there are many cases where I need to manually adjust the engine output control.
Also, since the ECU’s engine control can be unstable at times, I am still using the previous method.