I’m doing initial tuning of quadcopter I made with custom 3d printed frame and hobbywing x6-se motors with 22 inch props https://www.hobbywing.com/en/index.php/products/cmx6se
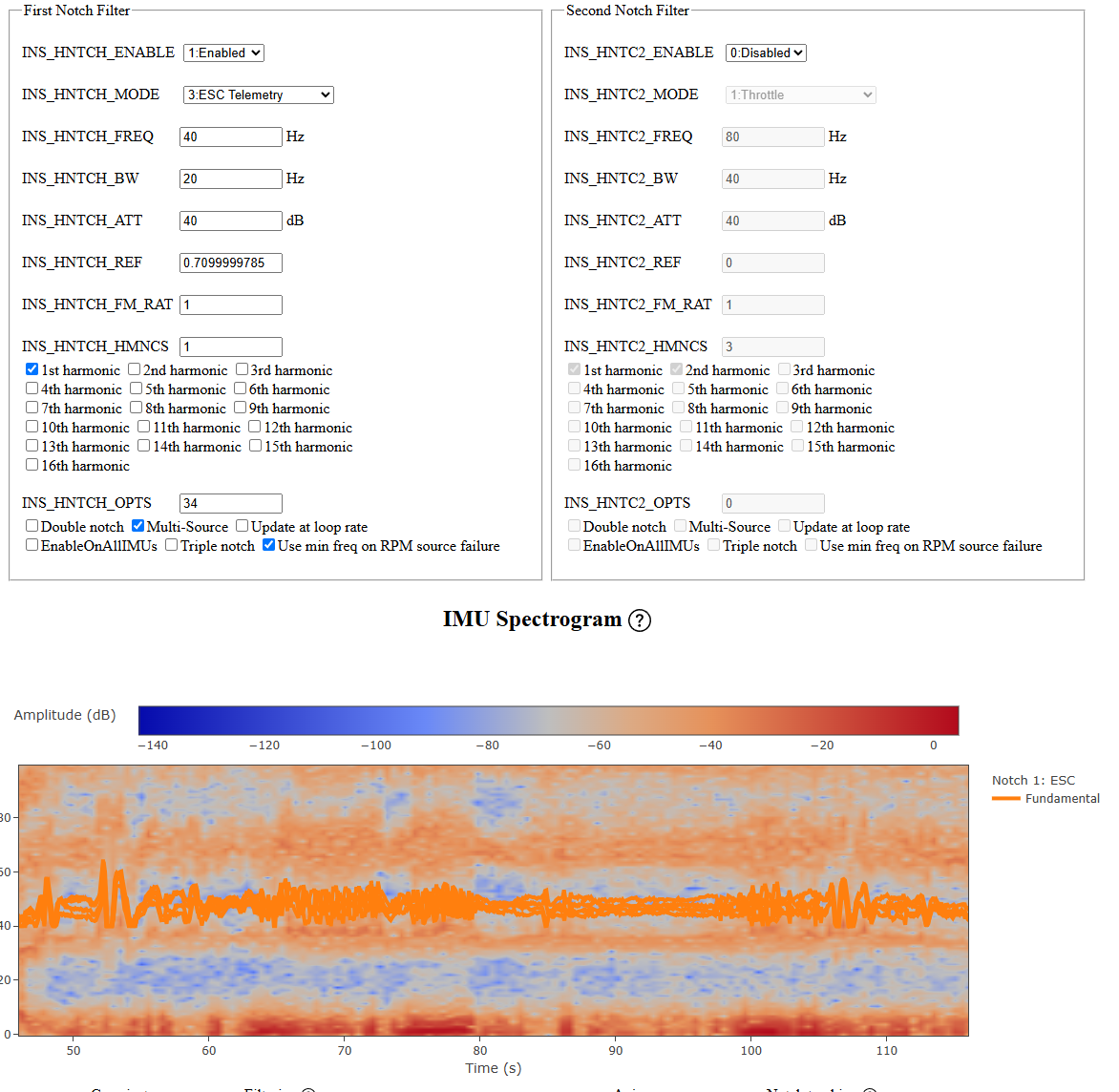
I have esc connected with CAN bus but looks like I’m getting RPM reading that are higher than real, so my notch filter sets to higher frequency than needed, is settings INS_HNTCH_REF correct way of doing this? Is that usual for hobbywing X class motors?
If possible please advice of correct logging setup and I would appreciate with any hints and notes about my config.
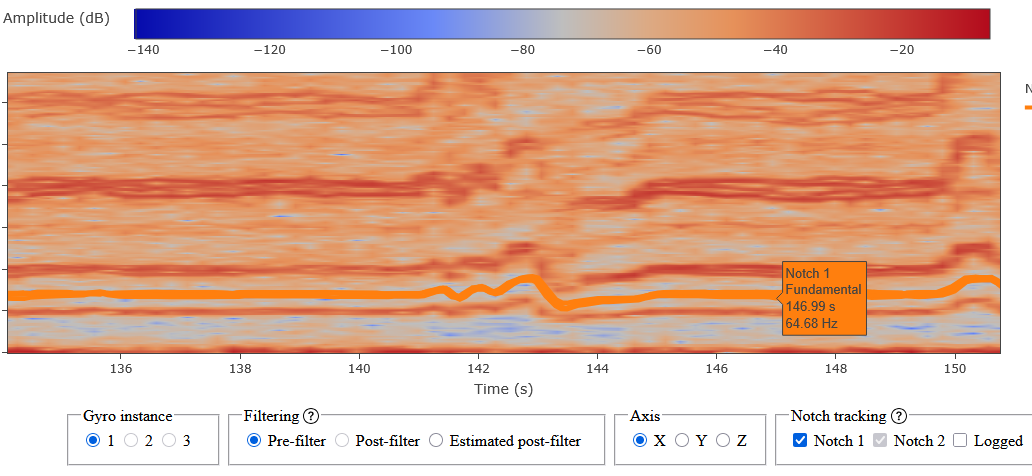
Here is an example - notch filter is set to ~ 70hz while actual noise is near 50hz
Don’t think it’s possible, motor and esc integrated in one case, RPM is sent by CAN bus, I can edit only direction of rotation. You think hobbywing should fix it by firmware update?
Are you saying about RPM1_SCALING ? I just not sure that it’s linear.
Changing magnet number in esc is not possible, I can set only node id, thrust id and direction, everything else is preconfigured by vendor.
I don’t use datalink via uart, motors are connected directly to CAN bus, so I don’t have this parameter available.
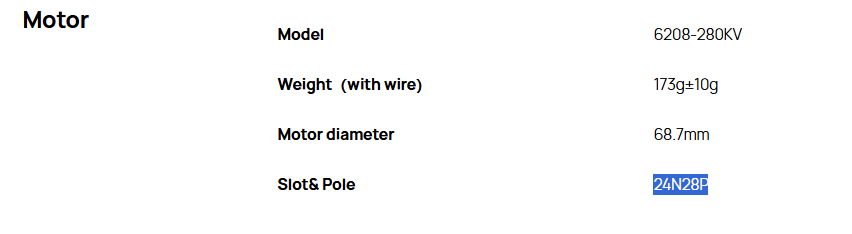
I only found KDE_NPOLE parameter that currently set to 14 but it probably to KDE ESC related, not hobbywing, and SERVO_BLH_POLES that also set to 14?