So far I have only tested in my backyard but after changing the Q_PIDs it seems to be ok and I can control the yaw reasonably. I will know more after this weekend and post a video where I can test it better in an open area. My backyard is rather tight with trees and upper canopy.
Before the Q_PID changes, the the wing was twisting along the CG since the plane was never designed to handle these forces. The Q_PID changes, although roughly done, seemed to help this a great deal. It will be interesting to see how this performs in some wind and determine if the wing needs additional support to reduce the twisting.
I looked up my Q_PIDs for my Bix3 conversion and the main difference I see is that FILT is set to 10 instead of 0. I will have to test this difference. My Ranger EX IMAX parameters are double the Bix3 due to the weaker power to weight ratio.
I did another hover test in my backyard today and the yaw authority is good. I also changed the FILT parameter in the Q_PIDs from 0 to 10 and the hover capability seems fine now. I’ll get a better test in this weekend.
My first test of the Volantex Ranger EX QuadPlane conversion was in my backyard. After making some Q_PID changes, the Ranger hovered nicely in an enclosed area with trees all around and an upper canopy. I tested Q_Stabilize and Q_Loiter modes while yawing 360 degrees using APM Plane v3.6.0
The wind swirled around my backyard but it did not affect the Ranger too much. I had the weathervane enabled and Q_VFWD_GAIN set to 0.05 so I hope to test Q_Loiter mode again in a larger field with constant breeze.
I’m quite surprised that your booms seem to be so rigid without the reinforcing I did on my Ranger’s wing (see the 4th pic in my blog here: https://www.rcgroups.com/forums/showthread.php?t=2680569). My wing is now one piece with the 2 x carbon square tubes running across the middle and all the way to the boom mounts. I really would have expected more wing twist on yours, but maybe the carbon is not necessary after all.
One thing I found with my Ranger is that the Q_A_RAT_YAW_P was far too low at the default value of 0.18. It would take maybe 15 secs to do a full 360 rotation. I have set this at 0.4 now and it rotates much more quickly.
I’m interested in the effect of the “FILT” and “IMAX” parameters you are changing. The parameter list does not explain much at all and Google search does not come up with much. Can you tell me what they do or link me to some further info?
I have seen your conversion design and thought it was quite elegant and professional. However, my goal was to make a simpler and less expensive conversion that may entice others to follow. Using my multicopter experience, my thought was that proper PID tuning should keep the system stable. So far, it seems to be working ok. Perhaps there are construction differences between the Quantum Observer and the newer Ranger EX design. Granted, the wing was never designed to handle these forces.
I checked my Q_A_RAT_YAW_P value and it was already set to 0.4, which is strange because my Bix3 conversion has it set to 0.18. I may have changed it when I was initially getting the Ranger EX to hover. I posted my latest Ranger EX param file below. I have also changed the Q_THR_MID to 740.
You are correct about information on IMAX and FILT being sparse. As for the IMAX value, my understanding is that IMAX is used to prevent an I term build up which can cause an overshoot. Before increasing IMAX to 1, the carbon arms would oscillate like a see-saw. One recommendation for FILT is here in the AutoTune section. Larger copters with props around 13" or larger should have FILT set to 10Hz. Typically, I use this value for RAT_PIT_FILT and RAT_RLL_FILT.
Hi Greg, was wondering how you are getting on with your Ranger. I’ve not flown mine for a while but hoping to get it up again soon. I recently upgraded to 3.7.1 but now I’m worried as there are 2 separate threads about a sharp pitch up after transition to winged flight. Kevin Garland actually lost his quadplane (see the video) but the other guy got away with. Maybe just coincidental…
Unfortunately, I have injured my back and have been on the mend for the past month. My Ranger sits here quietly waiting for more testing. I did see those threads and plan to keep my Bix3 and Ranger EX at v3.6.0 firmware for now. When Spring arrives, I can test whatever new software is available but I have good experience with v3.6.0 for now.
The Ranger EX can easily lift 4-5lbs so I installed a second payload mount for mapping and First Aid dropping using the NicaDrone OpenGrab EPM. Both payload mounts are identical but I can use the video cameras up front and the mapping or dropper stuff under the CG. Using APM, the images are automatically triggered on the S100 and logged. When the weather breaks, I can try my initial transition from hover to forward flight in a plowed parking lot.
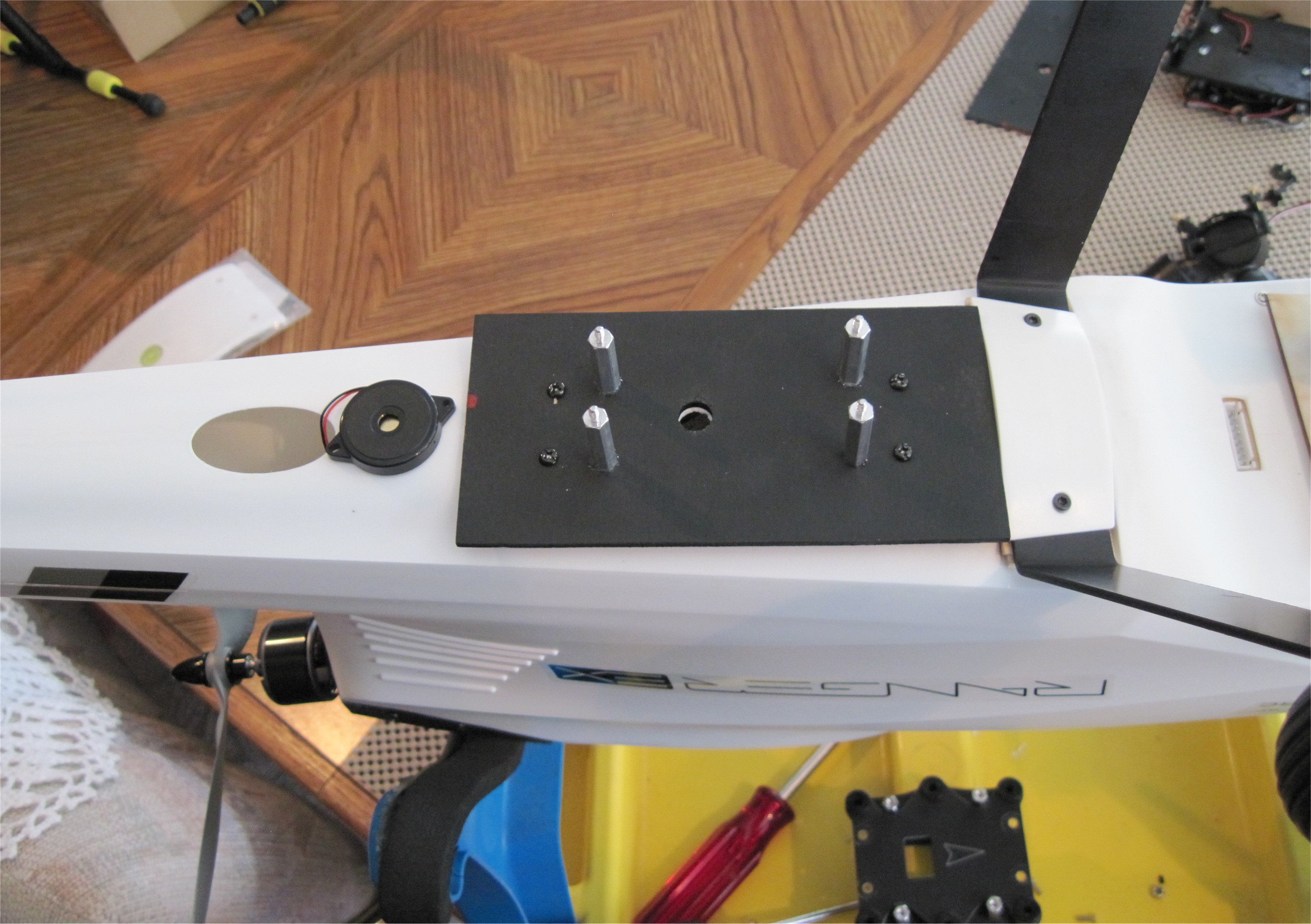
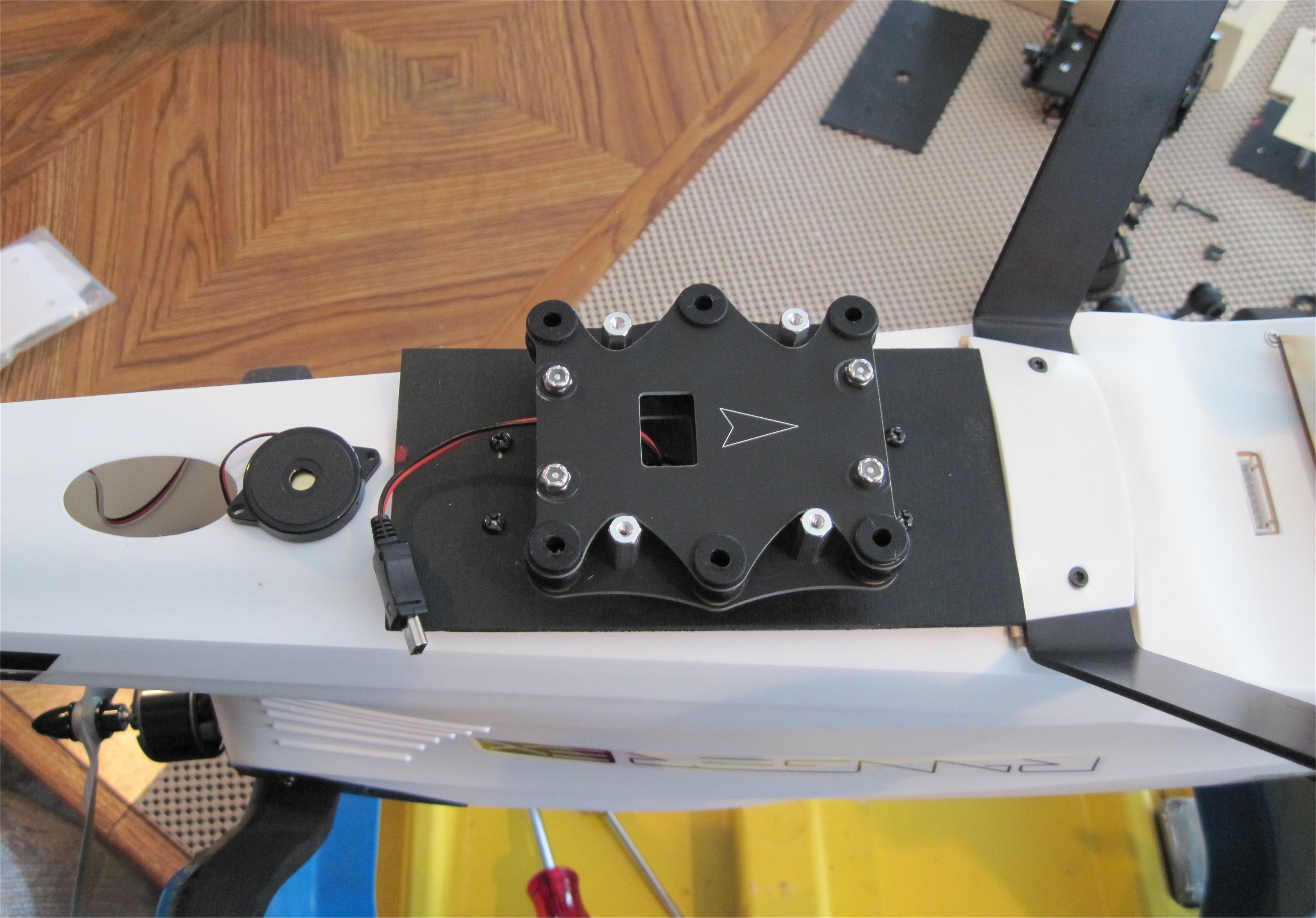
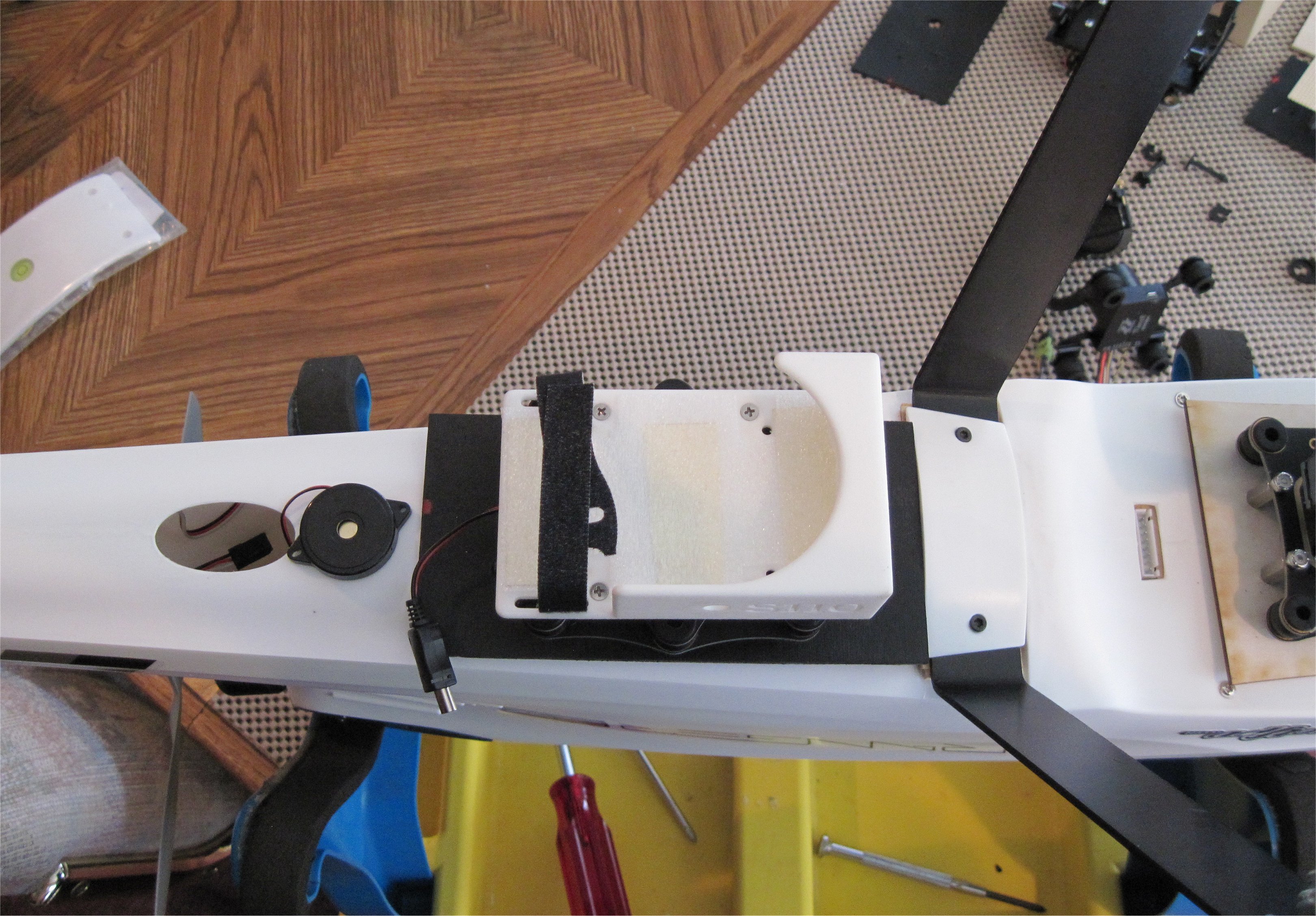
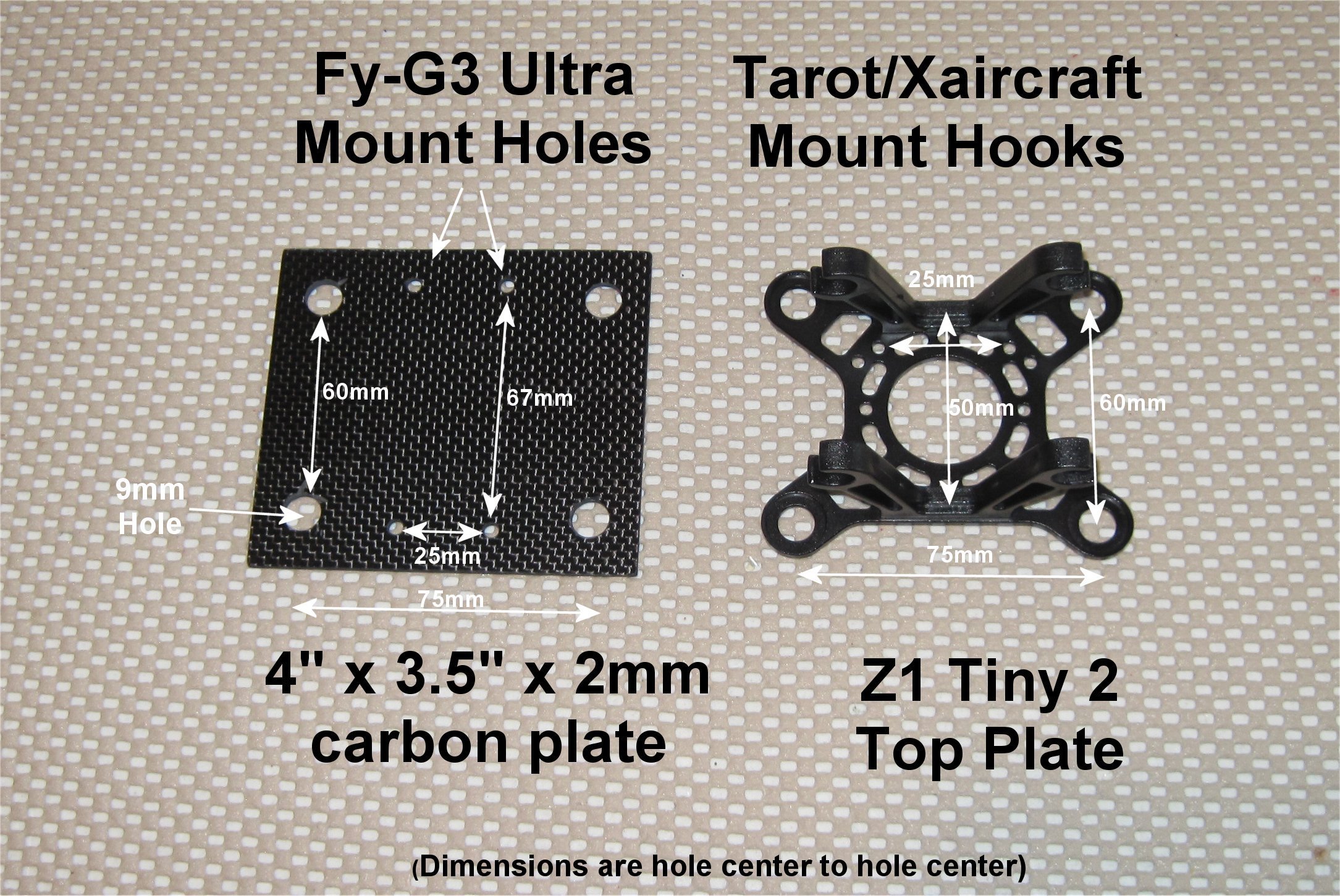
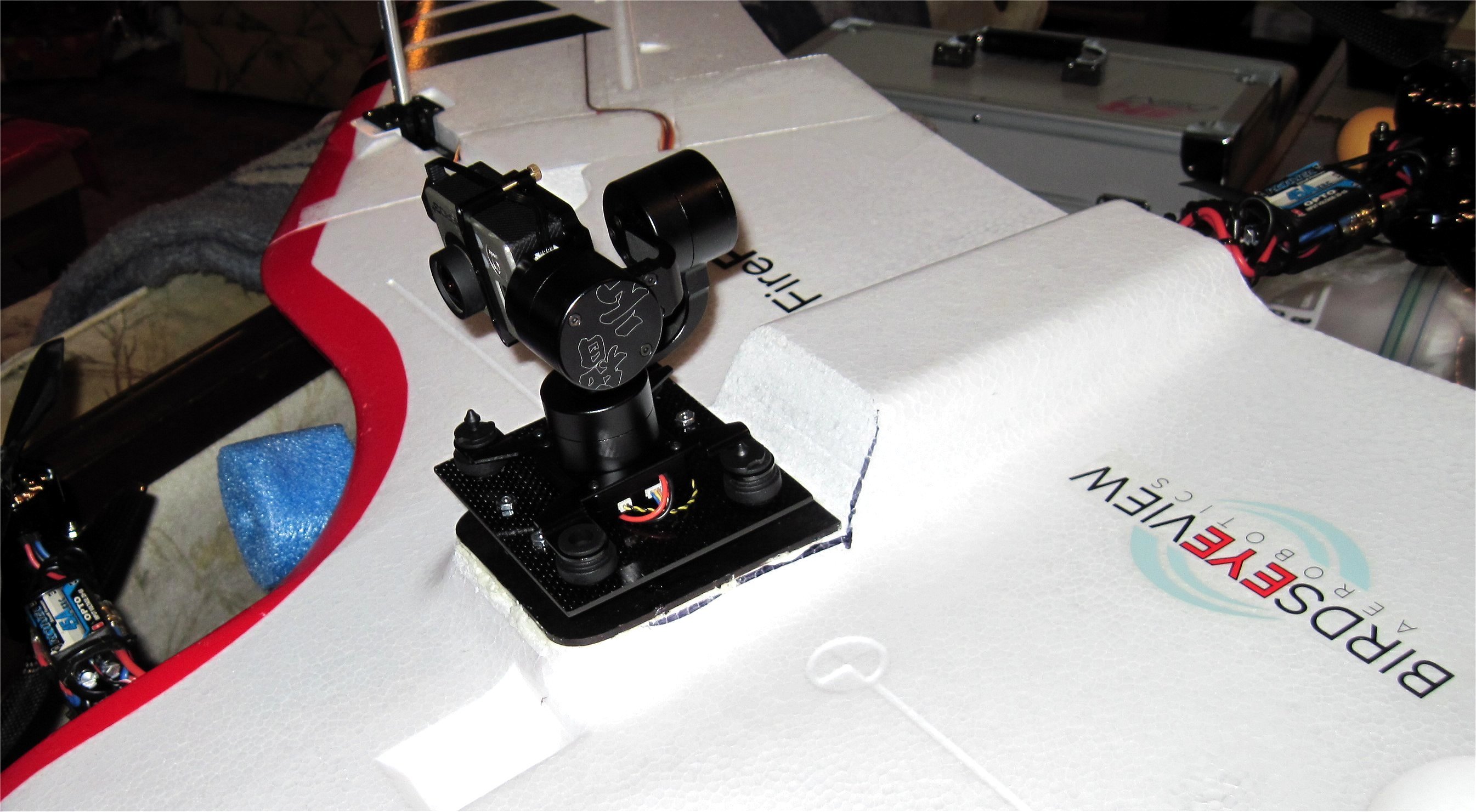
Next up, I am creating an easy conversion plate for my Z1 Tiny2 to use either Tarot hooks or the mount shown. The Canon S100 camera holder and trigger are from BEV Aerobotics. The mounts are replicated from the BirdsEyeView Aerobotics DIY payload set which uses the Feiyu 3-axis Ultra footprint. Fun stuff!
I added a Z1 Tiny 2 gimbal to my list of FireFLY6 DIY payloads. By making a custom carbon top plate for the gimbal, I can now mount the Z1 Tiny on all my mapping vehicles like the Ranger EX. Note that the Z1 Tiny 2 gimbal wiring includes the video feed for downlink or FPV.
The FireFLY6 DIY payload scheme uses the Feiyu Tech G3 Ultra mount holes and the Z1 Tiny 2 gimbal uses its own scheme that is similar to the Phantom 3 but not close enough. Now I can easily swap between the stock Z1 Tiny 2 top plate that is meant for Tarot/Xaircraft mount by transferring the rubber vibration dampener tops.
FYI - Tridge has added Y6 motor support for QuadPlane in the link below. I believe it has also been pushed to master now so it will be available in APM Plane v3.8.0.
HI Greg, Been reading your work while building mine. I just had my first successful hover, but the pods are way off, it’s very sluggish. can you give me some pointers? If you are any of the Facebook pixhawk ardupilot or am groups I have a video up today. Would really like to talk with you!
It’s probably just a matter of setting the PIDs for your power system. You could simply use the slider controls on the Basic Tuning Screen in Mission Planner.
I haven’t gotten back to testing my Ranger EX for transitions yet as the winter weather still lingers. On my other thread below, Rollys has had several successful transitions and flights. You could post more information on your setup here and there. For example, what is your motor Kv, prop size, and cell count. What does “the pods are way off” mean? Can you post some images?
sorry I meant pids. I have a Ranger Ex, octoplane. 8x 3506 650kv with 14x4.8 props. I posted a log for tridgell, but no response yet. I only had a test hover so far
Interesting, a Ranger EX Octoplane. I would love to see some photos so feel free to post them here. For an initial attempt to fix your PIDs, try adjusting the sliders in the appropriate direction of the Basic Tuning Screen. This should get you close.