Do you have a .TLOG and .BIN log of the flight that I might be able to view?
I just uploaded them to https://drive.google.com/open?id=0B_IdJRw2njBET1RFYXl5eGduZEU
I shared the log directory, the two files you asked for are the last two uploaded with a 12/2/2018 date.
Sorry about being slow to get them up here. I’m still uncertain what was going on on this flight. And I’m now ready to try again with a new GPS. But, the weather hasn’t cooperated yet.
RR
About the last flight:
I went back and compared some key EKF parameters and realized that I had changed two parameters prior to flying.
-
EK2_VELNE_M_NSE was changed from .5 to .1
-
EK2_GLITCH_RAD was changed from 25 to 10
I don’t believe EK2_GLITCH_RAD came into play during the flight. Position never drifted far enough way to cause a reset.
EK2_VELNE_M_NSE (if I understand it) does impact the data. When NKF4 SV is plotted, I believe that it is comparing inconstancy in the GPS velocity to the parameter. SInce I shrank the parameter by a factor of 5, the EKF plot is scaled up. If I were to divide the plotted values in the graph below by “5”, there wouldn’t be any that would be considered a problem (they all would be <.4).
If I have analyzed correctly, this flight didn’t show the problem and was OK. I had airspeed sensor problems that resulted in flying too slowly. This convinced me earlier that the plane was erratic, but it was probably doing a stall and correcting (a big problem, but not one for this thread).
So, the problem appeared to vanish for this flight. However, I flew yesterday and will add another post about the problem.
On to the new flight. On this one, I think I may have really solved my airspeed sensor issue (seems to be electromagnetic interference with the sensor and not with the I2C cable). I also flew with a new GPS unit (although it’s still a ublox M8N).
In addition to the two parameters mentioned above, I also changed the EK2_VEL_I_GATE from 500 to 300. Here’s the SV chart:
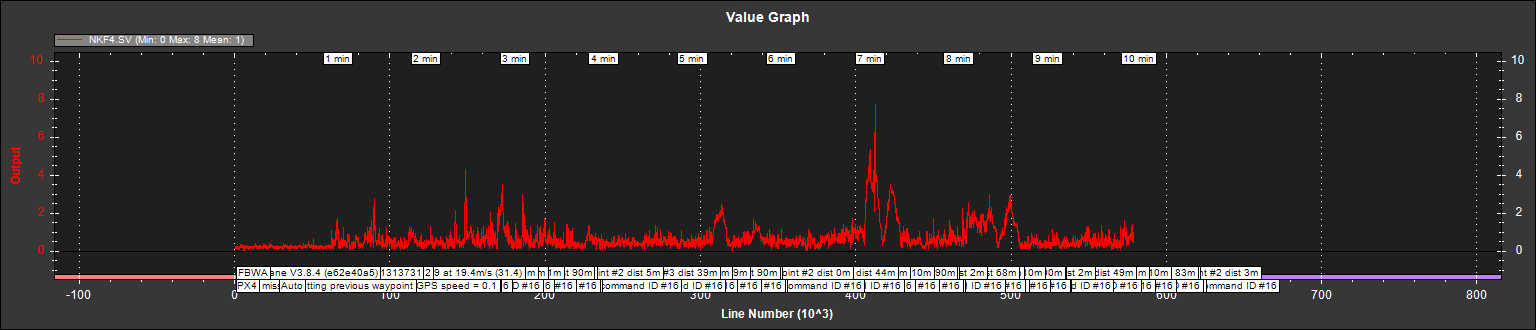
Although there are 4 or 5 places that look bad, only one occurrence (about 2/3rds of the way into the flight) exceeds a value of 5. Since I have the EK2_VELNE_M_NSE parameter set at 1/5th the default value…I believe that’s the only occurrence that would cause the EKF to cease using the data from the GPS if I reverted to the default parameter settings.
But one occurrence is one too many and leads me to believe that there’s still a problem lurking. I’ve now changed the GPS and the primary compass. Any idea of where to look next?
Log is at https://drive.google.com/open?id=1MzIJzecMt9R8xj5FcLAAwsK6ISX6XPn_
RR
I generally don’t see anything out-of-line in your logs, although I would improve your prop balancing or IMU Isolation. At higher throttle settings, I think you are having some aliasing that is causing those SV values to rise. Yours seem to stay average around 0.5 until later in the flight when your average throttle increased.
Those SV values are probably increasing because of the Z-acceleration variance (IMU.AccZ)

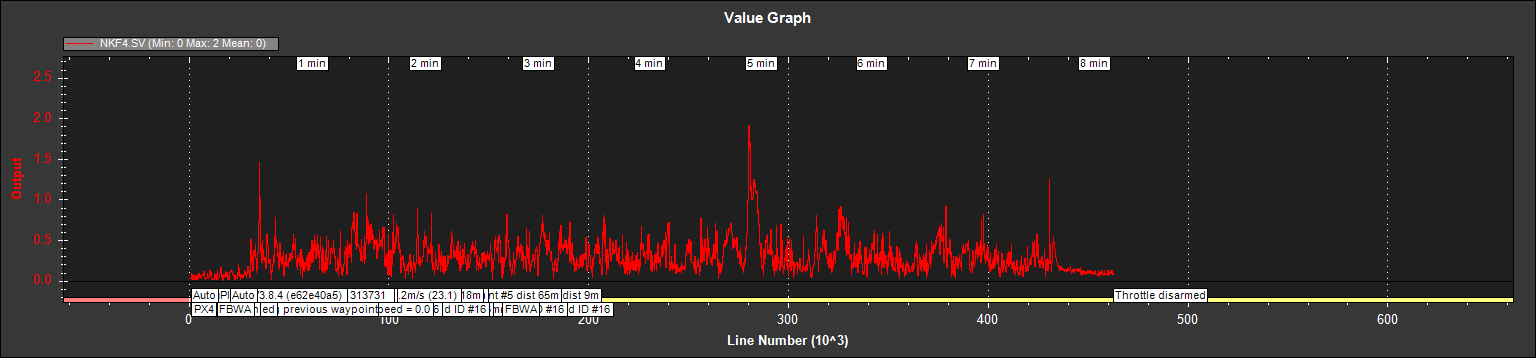
I compared the SV values to my most recent flight, and my values for a large, super-stable twin-engine plane peak around 0.2

My z-acceleration does not vary nearly as much as yours. Here is yours:

Here is mine:

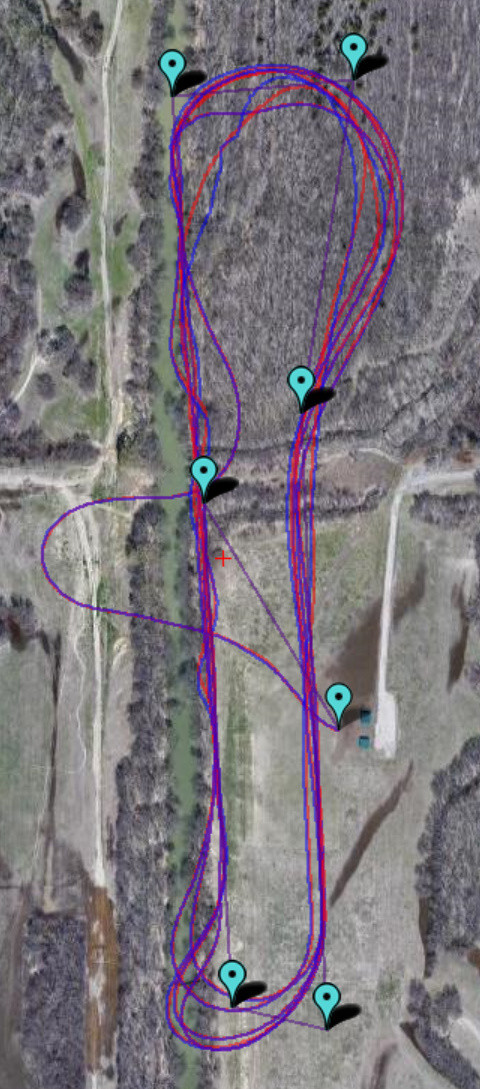
At this point, only looking at data is difficult. A picture of your plane and autopilot attachment would really help me diagnose any problems that you are having. It does look like your plane is following its mission well.
Here’s a picture of the plane and one of the flight controller bay.


The PixHawk is soft mounted with one of these:

It’s possible that a small amount of vibration might be coupled in from two sources. First, I had a telemetry cable routed through with quite a bit of heat shrink on it. I’ve trimmed it back to minimize the possibility. Second, the front of the controller just barely touches the bulkhead in front of it (it appears in contact, but there’s enough room that a piece of paper will slide between the two w/o binding).
If I look at the Vibrations 3.3 plot from the logs, the max values are still well within spec. The documentation says you need to be below 15m/s/s with occasional higher peaks. My max for the Z axis is only a tiny bit over 3.

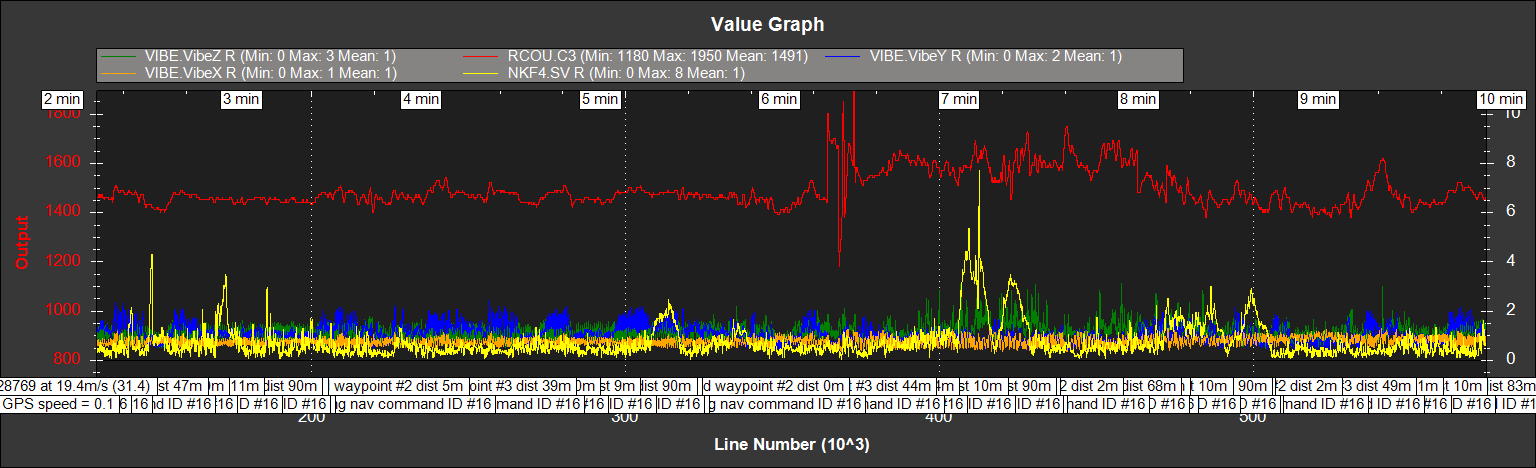
While clearly present, I tend to think that the higher level of vibration coincident with higher throttle is OK. If you look at the following graph, there are some large SV peaks (yellow line) with the lower throttle (red line) and some (including the biggest) are with the higher throttle.