Nios
January 13, 2025, 1:51pm
21
Hello again. I have changed the size of the Iris to 1.5 1.6 1 to resemble my drone (and the other values above as I mentioned earlier.) It takes off but it starts to take a big angle and eventually crashes, right after it reaches the desired height.
AP: Vibration compensation ON
height 5
AP: Crash: Disarming: AngErr=172>30, Accel=0.3<3.0
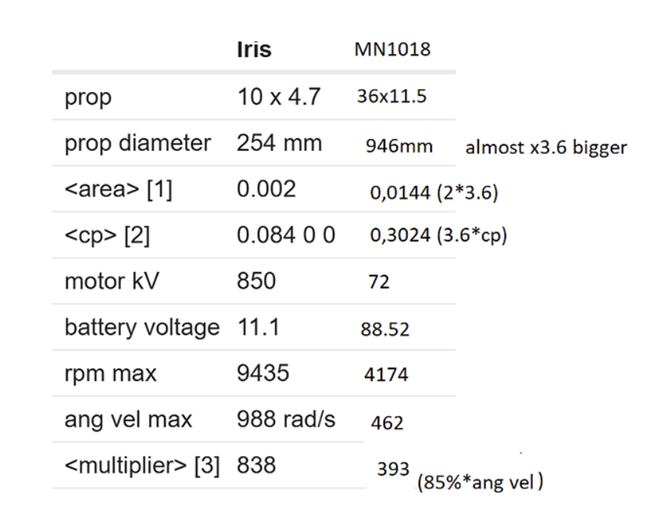
When I change the propellers parameters and inertia I have this issue, so I guess the cp and area are not correct? As I said earlier I tried to do the scaling you proposed on an other thread, depending on my motors.
Any help will be appreciated.
rhys
January 15, 2025, 2:35pm
22
The easiest way to help is if you can share the SDF of the copter you are trying to simulate. That way it will be possible to replicate the set up, and try and fix configuration issues. It’s difficult to do this without the model.
Nios
January 15, 2025, 2:43pm
23
Here are the sdf files:
Iris with ardupilot
<?xml version="1.0"?>
<sdf version="1.9">
<model name="iris_with_ardupilot">
<include>
<uri>model://iris_with_standoffs</uri>
</include>
<!-- plugins -->
<plugin filename="gz-sim-joint-state-publisher-system"
name="gz::sim::systems::JointStatePublisher">
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>0.3024 0 0</cp>
<forward>0 1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_1_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>-0.3024 0 0</cp>
<forward>0 -1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_1_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>0.3024 0 0</cp>
<forward>0 -1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_2_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>-0.3024 0 0</cp>
<forward>0 1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_2_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>0.3024 0 0</cp>
<forward>0 1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_3_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>-0.3024 0 0</cp>
<forward>0 -1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_3_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>0.3024 0 0</cp>
<forward>0 -1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_4_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>-0.3024 0 0</cp>
<forward>0 1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_4_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>0.3024 0 0</cp>
<forward>0 1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_5_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>-0.3024 0 0</cp>
<forward>0 -1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_5_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>0.3024 0 0</cp>
<forward>0 -1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_6_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>-0.3024 0 0</cp>
<forward>0 1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_6_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>0.3024 0 0</cp>
<forward>0 1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_7_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>-0.3024 0 0</cp>
<forward>0 -1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_7_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>0.3024 0 0</cp>
<forward>0 -1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_8_link</link_name>
</plugin>
<plugin filename="gz-sim-lift-drag-system"
name="gz::sim::systems::LiftDrag">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.0</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>-0.3024 0 0</cp>
<forward>0 1 0</forward>
<upward>0 0 1</upward>
<link_name>iris_with_standoffs::rotor_8_link</link_name>
</plugin>
<plugin name="ArduPilotPlugin"
filename="ArduPilotPlugin">
<!-- Port settings -->
<fdm_addr>127.0.0.1</fdm_addr>
<fdm_port_in>9002</fdm_port_in>
<connectionTimeoutMaxCount>5</connectionTimeoutMaxCount>
<lock_step>1</lock_step>
<have_32_channels>0</have_32_channels>
<!-- Frame conventions
Require by ArduPilot: change model and gazebo from XYZ to XY-Z coordinates
-->
<modelXYZToAirplaneXForwardZDown degrees="true">0 0 0 180 0 0</modelXYZToAirplaneXForwardZDown>
<gazeboXYZToNED degrees="true">0 0 0 180 0 90</gazeboXYZToNED>
<!-- Sensors -->
<imuName>iris_with_standoffs::imu_link::imu_sensor</imuName>
<!--
incoming control command [0, 1]
so offset it by 0 to get [0, 1]
and divide max target by 1.
offset = 0
multiplier = 838 max rpm / 1 = 838
-->
<control channel="0">
<jointName>iris_with_standoffs::rotor_1_joint</jointName>
<useForce>1</useForce>
<multiplier>838</multiplier>
<offset>0</offset>
<servo_min>1100</servo_min>
<servo_max>1900</servo_max>
<type>VELOCITY</type>
<p_gain>0.20</p_gain>
<i_gain>0</i_gain>
<d_gain>0</d_gain>
<i_max>0</i_max>
<i_min>0</i_min>
<cmd_max>2.5</cmd_max>
<cmd_min>-2.5</cmd_min>
<controlVelocitySlowdownSim>1</controlVelocitySlowdownSim>
</control>
<control channel="1">
<jointName>iris_with_standoffs::rotor_2_joint</jointName>
<useForce>1</useForce>
<multiplier>-838</multiplier>
<offset>0</offset>
<servo_min>1100</servo_min>
<servo_max>1900</servo_max>
<type>VELOCITY</type>
<p_gain>0.20</p_gain>
<i_gain>0</i_gain>
<d_gain>0</d_gain>
<i_max>0</i_max>
<i_min>0</i_min>
<cmd_max>2.5</cmd_max>
<cmd_min>-2.5</cmd_min>
<controlVelocitySlowdownSim>1</controlVelocitySlowdownSim>
</control>
<control channel="2">
<jointName>iris_with_standoffs::rotor_3_joint</jointName>
<useForce>1</useForce>
<multiplier>838</multiplier>
<offset>0</offset>
<servo_min>1100</servo_min>
<servo_max>1900</servo_max>
<type>VELOCITY</type>
<p_gain>0.20</p_gain>
<i_gain>0</i_gain>
<d_gain>0</d_gain>
<i_max>0</i_max>
<i_min>0</i_min>
<cmd_max>2.5</cmd_max>
<cmd_min>-2.5</cmd_min>
<controlVelocitySlowdownSim>1</controlVelocitySlowdownSim>
</control>
<control channel="3">
<jointName>iris_with_standoffs::rotor_4_joint</jointName>
<useForce>1</useForce>
<multiplier>-838</multiplier>
<offset>0</offset>
<servo_min>1100</servo_min>
<servo_max>1900</servo_max>
<type>VELOCITY</type>
<p_gain>0.20</p_gain>
<i_gain>0</i_gain>
<d_gain>0</d_gain>
<i_max>0</i_max>
<i_min>0</i_min>
<cmd_max>2.5</cmd_max>
<cmd_min>-2.5</cmd_min>
<controlVelocitySlowdownSim>1</controlVelocitySlowdownSim>
</control>
<control channel="4">
<jointName>iris_with_standoffs::rotor_5_joint</jointName>
<useForce>1</useForce>
<multiplier>838</multiplier>
<offset>0</offset>
<servo_min>1100</servo_min>
<servo_max>1900</servo_max>
<type>VELOCITY</type>
<p_gain>0.20</p_gain>
<i_gain>0</i_gain>
<d_gain>0</d_gain>
<i_max>0</i_max>
<i_min>0</i_min>
<cmd_max>2.5</cmd_max>
<cmd_min>-2.5</cmd_min>
<controlVelocitySlowdownSim>1</controlVelocitySlowdownSim>
</control>
<control channel="5">
<jointName>iris_with_standoffs::rotor_6_joint</jointName>
<useForce>1</useForce>
<multiplier>-838</multiplier>
<offset>0</offset>
<servo_min>1100</servo_min>
<servo_max>1900</servo_max>
<type>VELOCITY</type>
<p_gain>0.20</p_gain>
<i_gain>0</i_gain>
<d_gain>0</d_gain>
<i_max>0</i_max>
<i_min>0</i_min>
<cmd_max>2.5</cmd_max>
<cmd_min>-2.5</cmd_min>
<controlVelocitySlowdownSim>1</controlVelocitySlowdownSim>
</control>
<control channel="6">
<jointName>iris_with_standoffs::rotor_7_joint</jointName>
<useForce>1</useForce>
<multiplier>838</multiplier>
<offset>0</offset>
<servo_min>1100</servo_min>
<servo_max>1900</servo_max>
<type>VELOCITY</type>
<p_gain>0.20</p_gain>
<i_gain>0</i_gain>
<d_gain>0</d_gain>
<i_max>0</i_max>
<i_min>0</i_min>
<cmd_max>2.5</cmd_max>
<cmd_min>-2.5</cmd_min>
<controlVelocitySlowdownSim>1</controlVelocitySlowdownSim>
</control>
<control channel="7">
<jointName>iris_with_standoffs::rotor_8_joint</jointName>
<useForce>1</useForce>
<multiplier>-838</multiplier>
<offset>0</offset>
<servo_min>1100</servo_min>
<servo_max>1900</servo_max>
<type>VELOCITY</type>
<p_gain>0.20</p_gain>
<i_gain>0</i_gain>
<d_gain>0</d_gain>
<i_max>0</i_max>
<i_min>0</i_min>
<cmd_max>2.5</cmd_max>
<cmd_min>-2.5</cmd_min>
<controlVelocitySlowdownSim>1</controlVelocitySlowdownSim>
</control>
</plugin>
</model>
</sdf>
Iris with standoffs
<?xml version="1.0"?>
<sdf version="1.9">
<model name="iris_with_standoffs">
<pose>0 0 0 0 0 0</pose>
<link name="base_link">
<velocity_decay>
<linear>0.0</linear>
<angular>0.0</angular>
</velocity_decay>
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>68</mass>
<inertia>
<ixx>14.73</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>13.83</iyy>
<iyz>0</iyz>
<izz>22.57</izz>
</inertia>
</inertial>
<collision name="base_collision">
<pose>0 0 -0.08 0 0 0</pose>
<geometry>
<box>
<size>1.5 1.5 0.9</size>
</box>
</geometry>
<surface>
<contact>
<ode>
<max_vel>100.0</max_vel>
<min_depth>0.001</min_depth>
</ode>
</contact>
<friction>
<ode>
<mu>100000.0</mu>
<mu2>100000.0</mu2>
</ode>
</friction>
</surface>
</collision>
<visual name="base_visual">
<geometry>
<mesh>
<uri>model://iris_with_standoffs/meshes/iris.dae</uri>
</mesh>
</geometry>
<material>
<ambient>0.05 0.05 0.05</ambient>
<diffuse>0.05 0.05 0.05</diffuse>
<specular>1 1 1 1</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<visual name="front_left_leg_visual">
<pose>23 0.22 -0.11 0 0 0</pose>
<geometry>
<cylinder>
<radius>0.005</radius>
<length>0.17</length>
</cylinder>
</geometry>
<material>
<ambient>0.05 0.05 0.05</ambient>
<diffuse>0.05 0.05 0.05</diffuse>
<specular>0.01 0.01 0.01 1.0</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<visual name="front_right_leg_visual">
<pose>0.123 -0.22 -0.11 0 0 0</pose>
<geometry>
<cylinder>
<radius>0.005</radius>
<length>0.17</length>
</cylinder>
</geometry>
<material>
<ambient>0.05 0.05 0.05</ambient>
<diffuse>0.05 0.05 0.05</diffuse>
<specular>0.01 0.01 0.01 1.0</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<visual name="rear_left_leg_visual">
<pose>-0.140 0.21 -0.11 0 0 0</pose>
<geometry>
<cylinder>
<radius>0.005</radius>
<length>0.17</length>
</cylinder>
</geometry>
<material>
<ambient>0.05 0.05 0.05</ambient>
<diffuse>0.05 0.05 0.05</diffuse>
<specular>0.01 0.01 0.01 1.0</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<visual name="rear_right_leg_visual">
<pose>-0.140 -0.21 -0.11 0 0 0</pose>
<geometry>
<cylinder>
<radius>0.005</radius>
<length>0.17</length>
</cylinder>
</geometry>
<material>
<ambient>0.05 0.05 0.05</ambient>
<diffuse>0.05 0.05 0.05</diffuse>
<specular>0.01 0.01 0.01 1.0</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
</link>
<link name="imu_link">
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>0.15</mass>
<inertia>
<ixx>0.00001</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.00002</iyy>
<iyz>0</iyz>
<izz>0.00002</izz>
</inertia>
</inertial>
<sensor name="imu_sensor" type="imu">
<pose degrees="true">0 0 0 180 0 0</pose>
<always_on>1</always_on>
<update_rate>1000.0</update_rate>
</sensor>
</link>
<joint name="imu_joint" type="revolute">
<child>imu_link</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>0</lower>
<upper>0</upper>
<effort>0</effort>
<velocity>0</velocity>
</limit>
<dynamics>
<damping>1.0</damping>
</dynamics>
</axis>
</joint>
<link name="rotor_1_link">
<pose>0.13 -0.22 0.023 0 0 0</pose>
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>0.2</mass>
<inertia>
<ixx>9.75e-06</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000166704</iyy>
<iyz>0</iyz>
<izz>0.000167604</izz>
</inertia>
</inertial>
<collision name="collision">
<pose>0 0 0 0 0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.46</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="visual">
<pose>0 0 0 0 0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://iris_with_standoffs/meshes/iris_prop_ccw.dae</uri>
</mesh>
</geometry>
<material>
<ambient>0 0 1</ambient>
<diffuse>0 0 1</diffuse>
<specular>1 1 1 1</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="rotor_1_joint" type="revolute">
<child>rotor_1_link</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<damping>0.004</damping>
</dynamics>
</axis>
<physics>
<ode>
<implicit_spring_damper>1</implicit_spring_damper>
</ode>
</physics>
</joint>
<link name="rotor_2_link">
<pose>0.13 0.22 0.023 0 0 0</pose>
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>0.2</mass>
<inertia>
<ixx>9.75e-06</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000166704</iyy>
<iyz>0</iyz>
<izz>0.000167604</izz>
</inertia>
</inertial>
<collision name="collision">
<pose>0 0 0 0 0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.46</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="visual">
<pose>0 0 0 0 0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://iris_with_standoffs/meshes/iris_prop_cw.dae</uri>
</mesh>
</geometry>
<material>
<ambient>0 1 0</ambient>
<diffuse>0 1 0</diffuse>
<specular>1 1 1 1</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="rotor_2_joint" type="revolute">
<child>rotor_2_link</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<damping>0.004</damping>
</dynamics>
</axis>
<physics>
<ode>
<implicit_spring_damper>1</implicit_spring_damper>
</ode>
</physics>
</joint>
<link name="rotor_3_link">
<pose>-0.13 0.2 0.023 0 0 0</pose>
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>0.2</mass>
<inertia>
<ixx>9.75e-06</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000166704</iyy>
<iyz>0</iyz>
<izz>0.000167604</izz>
</inertia>
</inertial>
<collision name="collision">
<pose>0 0 0 0 0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.46</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="visual">
<pose>0 0 0 0 0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://iris_with_standoffs/meshes/iris_prop_ccw.dae</uri>
</mesh>
</geometry>
<material>
<ambient>0 0 1</ambient>
<diffuse>0 0 1</diffuse>
<specular>1 1 1 1</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="rotor_3_joint" type="revolute">
<child>rotor_3_link</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<damping>0.004</damping>
</dynamics>
</axis>
<physics>
<ode>
<implicit_spring_damper>1</implicit_spring_damper>
</ode>
</physics>
</joint>
<link name="rotor_4_link">
<pose>-0.13 -0.2 0.023 0 0 0</pose>
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>0.2</mass>
<inertia>
<ixx>9.75e-06</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000166704</iyy>
<iyz>0</iyz>
<izz>0.000167604</izz>
</inertia>
</inertial>
<collision name="collision">
<pose>0 0 0 0 0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.46</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="visual">
<pose>0 0 0 0 0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://iris_with_standoffs/meshes/iris_prop_cw.dae</uri>
</mesh>
</geometry>
<material>
<ambient>0 1 0</ambient>
<diffuse>0 1 0</diffuse>
<specular>1 1 1 1</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="rotor_4_joint" type="revolute">
<child>rotor_4_link</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<damping>0.004</damping>
</dynamics>
</axis>
<physics>
<ode>
<implicit_spring_damper>1</implicit_spring_damper>
</ode>
</physics>
</joint>
<link name="rotor_5_link">
<pose>0.13 0.22 -0.023 0 0 0</pose>
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>0.2</mass>
<inertia>
<ixx>9.75e-06</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000166704</iyy>
<iyz>0</iyz>
<izz>0.000167604</izz>
</inertia>
</inertial>
<collision name="collision">
<pose>0 0 0 0 0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.46</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="visual">
<pose>0 0 0 0 0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://iris_with_standoffs/meshes/iris_prop_ccw.dae</uri>
</mesh>
</geometry>
<material>
<ambient>0 0 1</ambient>
<diffuse>0 0 1</diffuse>
<specular>1 1 1 1</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="rotor_5_joint" type="revolute">
<child>rotor_5_link</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<damping>0.004</damping>
</dynamics>
</axis>
<physics>
<ode>
<implicit_spring_damper>1</implicit_spring_damper>
</ode>
</physics>
</joint>
<link name="rotor_6_link">
<pose>0.13 -0.22 -0.023 0 0 0</pose>
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>0.2</mass>
<inertia>
<ixx>9.75e-06</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000166704</iyy>
<iyz>0</iyz>
<izz>0.000167604</izz>
</inertia>
</inertial>
<collision name="collision">
<pose>0 0 0 0 0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.46</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="visual">
<pose>0 0 0 0 0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://iris_with_standoffs/meshes/iris_prop_cw.dae</uri>
</mesh>
</geometry>
<material>
<ambient>0 1 0</ambient>
<diffuse>0 1 0</diffuse>
<specular>1 1 1 1</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="rotor_6_joint" type="revolute">
<child>rotor_6_link</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<damping>0.004</damping>
</dynamics>
</axis>
<physics>
<ode>
<implicit_spring_damper>1</implicit_spring_damper>
</ode>
</physics>
</joint>
<link name="rotor_7_link">
<pose>-0.13 -0.2 -0.023 0 0 0</pose>
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>0.2</mass>
<inertia>
<ixx>9.75e-06</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000166704</iyy>
<iyz>0</iyz>
<izz>0.000167604</izz>
</inertia>
</inertial>
<collision name="collision">
<pose>0 0 0 0 0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.46</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="visual">
<pose>0 0 0 0 0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://iris_with_standoffs/meshes/iris_prop_ccw.dae</uri>
</mesh>
</geometry>
<material>
<ambient>0 0 1</ambient>
<diffuse>0 0 1</diffuse>
<specular>1 1 1 1</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="rotor_7_joint" type="revolute">
<child>rotor_7_link</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<damping>0.004</damping>
</dynamics>
</axis>
<physics>
<ode>
<implicit_spring_damper>1</implicit_spring_damper>
</ode>
</physics>
</joint>
<link name="rotor_8_link">
<pose>-0.13 0.2 -0.023 0 0 0</pose>
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>0.2</mass>
<inertia>
<ixx>9.75e-06</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000166704</iyy>
<iyz>0</iyz>
<izz>0.000167604</izz>
</inertia>
</inertial>
<collision name="collision">
<pose>0 0 0 0 0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.46</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="visual">
<pose>0 0 0 0 0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://iris_with_standoffs/meshes/iris_prop_cw.dae</uri>
</mesh>
</geometry>
<material>
<ambient>0 1 0</ambient>
<diffuse>0 1 0</diffuse>
<specular>1 1 1 1</specular>
<pbr>
<metal>
<metalness>0.5</metalness>
<roughness>0.5</roughness>
</metal>
</pbr>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="rotor_8_joint" type="revolute">
<child>rotor_8_link</child>
<parent>base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<damping>0.004</damping>
</dynamics>
</axis>
<physics>
<ode>
<implicit_spring_damper>1</implicit_spring_damper>
</ode>
</physics>
</joint>
</model>
</sdf>