Hello again. Depending on your advice at this thread: Drone is too heavy to takeoff in simulation - Gazebo Plugin - #6 by rhys, I tried to changed some values. My motors are: MN1018 Navigator Type UAV Multi-Motor KV72_Navigator Type_Motors_Multi-rotor UAV Power_T-MOTOR Official Store-Multi-rotor UAV,Fixed Wing,VTOL,FPV and Robot Power and propellers are: G36*11.5 Prop-2PCS/PAIR_Glossy_Carbon Fiber_Propellers_Multi-rotor UAV Power_T-MOTOR Official Store-Multi-rotor UAV,Fixed Wing,VTOL,FPV and Robot Power. The drone is octoquad/H.
I tried to scale the Iris parameters depending on my propeller size:
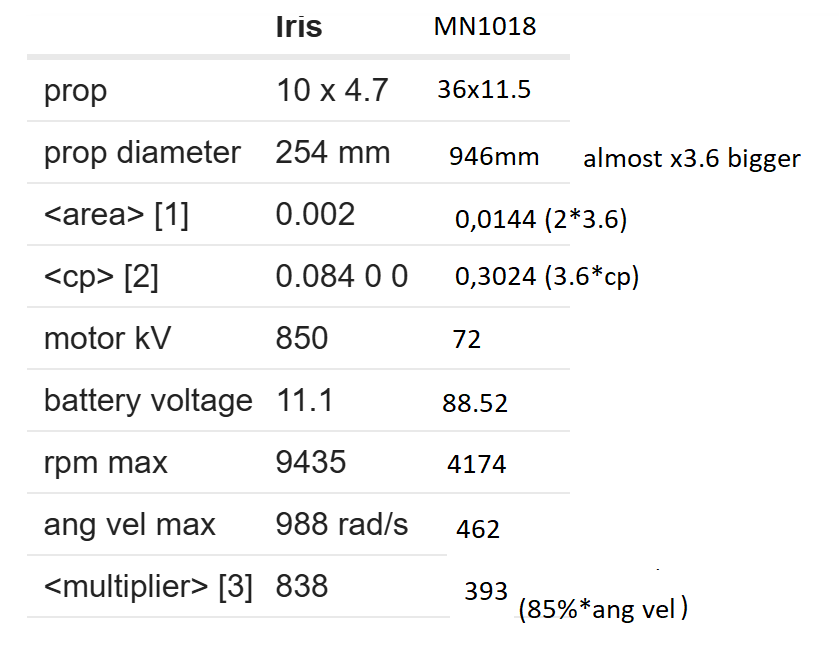
My drone’s parameters are:
<mass>68</mass>
<inertia>
<ixx>1.021</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>1.021</iyy>
<iyz>0</iyz>
<izz>2.081</izz>
</inertia>
</inertial>
<collision name='base_link_collision'>
<pose>0 0 0 0 0 0</pose>
<geometry>
<box>
<size>1.5 1.606 1</size>
and propellers:
<inertial>
<pose>0 0 0 0 -0 0</pose>
<mass>0.193</mass>
<inertia>
<ixx>9.75e-06</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000166704</iyy>
<iyz>0</iyz>
<izz>0.000167604</izz>
</inertia>
</inertial>
<collision name='rotor_0_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.945</radius>
I also changed the cp and area values as you suggested depending on the above scalings. The motor 7 follow (cw, back right/ down side) as an example.
<plugin name="rotor_7_blade_1" filename="libLiftDragPlugin.so">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.00</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>0.3024 0 0</cp>
<forward>0 -1 0</forward>
<upward>0 0 1</upward>
<link_name>iris::rotor_7</link_name>
</plugin>
<plugin name="rotor_7_blade_2" filename="libLiftDragPlugin.so">
<a0>0.3</a0>
<alpha_stall>1.4</alpha_stall>
<cla>4.2500</cla>
<cda>0.10</cda>
<cma>0.00</cma>
<cla_stall>-0.025</cla_stall>
<cda_stall>0.0</cda_stall>
<cma_stall>0.0</cma_stall>
<area>0.0144</area>
<air_density>1.2041</air_density>
<cp>-0.3024 0 0</cp>
<forward>0 1 0</forward>
<upward>0 0 1</upward>
<link_name>iris::rotor_7</link_name>
</plugin>
Also, I have changed the multiplier to 400 (I even tried 5000) and still “potential thrust loss”. Only when I lower the drone’s weight to 5kg with smaller inertia values, the drone takes off but it is completely unstable.
Lastly, what about the .parm file? Do I add my real drones parameters? or should I not change the default octoquad.parm?
Thank you in advance, as no documentation is out there, it seem that you are the only chance to fix this.