I’m going to check again mine today, try again and report if any success. Mine has a Pixracer (auav) with 3.4
I hope I was in the moon when I set Mid thr, my guy is re-overpowered, I have to solve that first.
My thr_Mid was not set correctly. It was too low in the log above. (I put different props on this copter last week and didn’t adjust it.)
I fixed that, and have a little less trouble starting the tune, but the rest is still the same.
It doesn’t move much, so I don’t really know while in the field, if the tune is working.
Looking at my log, it looks like it did start, but I flipped the switch off after a while because I didn’t think it was doing anything.
What about mot_spin_armed? i had the same problem but was changing all sorts of options to fix oscillation, and one of them also made the autotune twitches much more noticeable.
What do you have AUTOTUNE_AGGR set to? Try changing that, it alters the size of the bounceback. Also what are our current roll/pitch PIDs? If they’re too small then you might not see much movement - does your copter react responsively to stick movement?
Hi, thanks for the suggestions.
Mot_spin_armed is at 55
Autotune_Aggr to .05
Current PID’s are low, because I copied settings from my working 3.3 copter, and manually tuned a little, first, to get the bad oscillations out b4 the auto-tune.
Roll
P,I: .035
D: .0015
Filt 80
Pitch
P,I: .09
D: .003
Filt 40
Copter fly’s great w/ these PID’s… I’m just testing everything and reporting my results… So… Don’t fix this for me… Fix it for the community 
What size is your copter, fnoop? (The one you’ve tuned w/ 3.4) Also a little racer size one?
Try changing the autotune_aggr to 0.1 and see if it makes any difference? If you’ve got it flying great, then great! I think up until recently apm just wasn’t used much on smaller copters so most of the defaults/code is geared up for larger copters. Perhaps autotune just needs a bit of tweaking for smaller craft. I’m flying a 360, detailed my issues here:
http://discuss.ardupilot.org/t/small-360mm-quad-oscillation-problems/8365
Flies great now 
BUT… (this is the part that’s bothering me)
This same copter auto-tunes great w/ 3.3… so they did have it working with these small copters.
Otherwise I do agree with what you’re saying… I think most of the development is geared towards larger craft, which is why we’re finding the issues on these small ones.
But they’re apparently trying to add more support for small copters, so I’d expect the newer release to be easier to set up… not more confusing. (so I’m still hoping it’s something in the code they can change… if not, and things just have to be near perfect for these small copters now, ok… but lets have an official announcement about that!)
–This isn’t worth its own post, but if someone knows the default imax settings for 3.4, could you let me know?
Thanks you!
Is that the 3.3-pixracer release?
no, I guess it’s a little misleading to say it’s the “same” copter. Everything is the same other than the flight controller. The copter that works is an AUAV-X2 w/ 3.3.
I’ve been struggling with the Pixracer as well. I spoke with someone who said they are having better luck with the PX4 stack. I just miss autotune.
Autotune does not work on a DJI F550 Flywheel with 1.9 kg.either.(No twitches to see)
And I had to increase the PID’s for Roll/Pitch/Yaw 4 times higher than the defaults to control the copter as it
was with Pixhawk and 3.3.3 This is the result of 30 testflights with about 1 1/2 hour.
The reaction on PID corrections are realy strange and no typicaly. e.g. Start wobbeling at Rate Roll/Pitch P = 0.7
(default Pixracer 0.135 and with Pixhawk 3.3.3 P=0.18, same Frame)
So far no issues with Pixhawk and PX4Lite gold with FW from 2.9 to 3.3.3
If you post a log I can ask Leonard to look at it.
Verry kind, thank you.
But the .bin File is just to large to upload here (3086 kB).
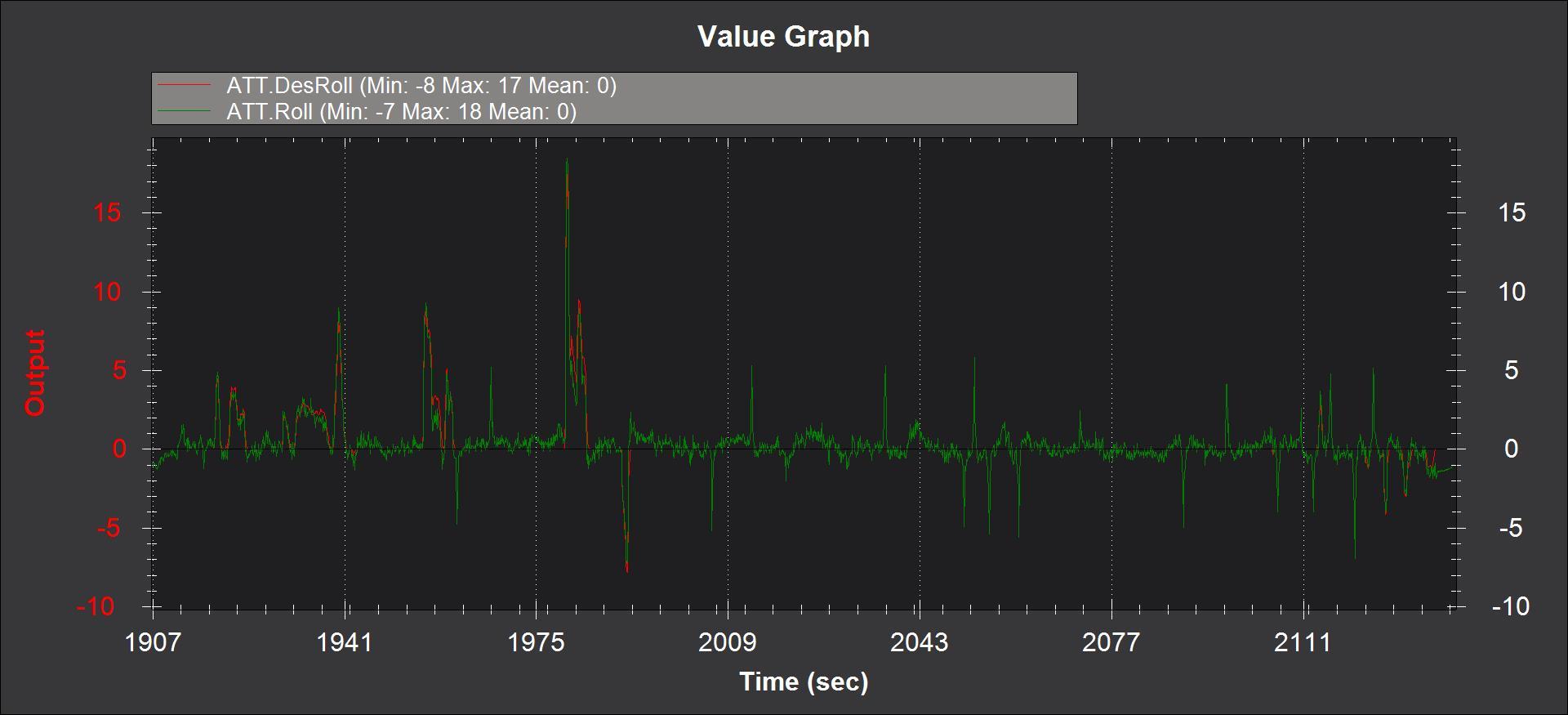
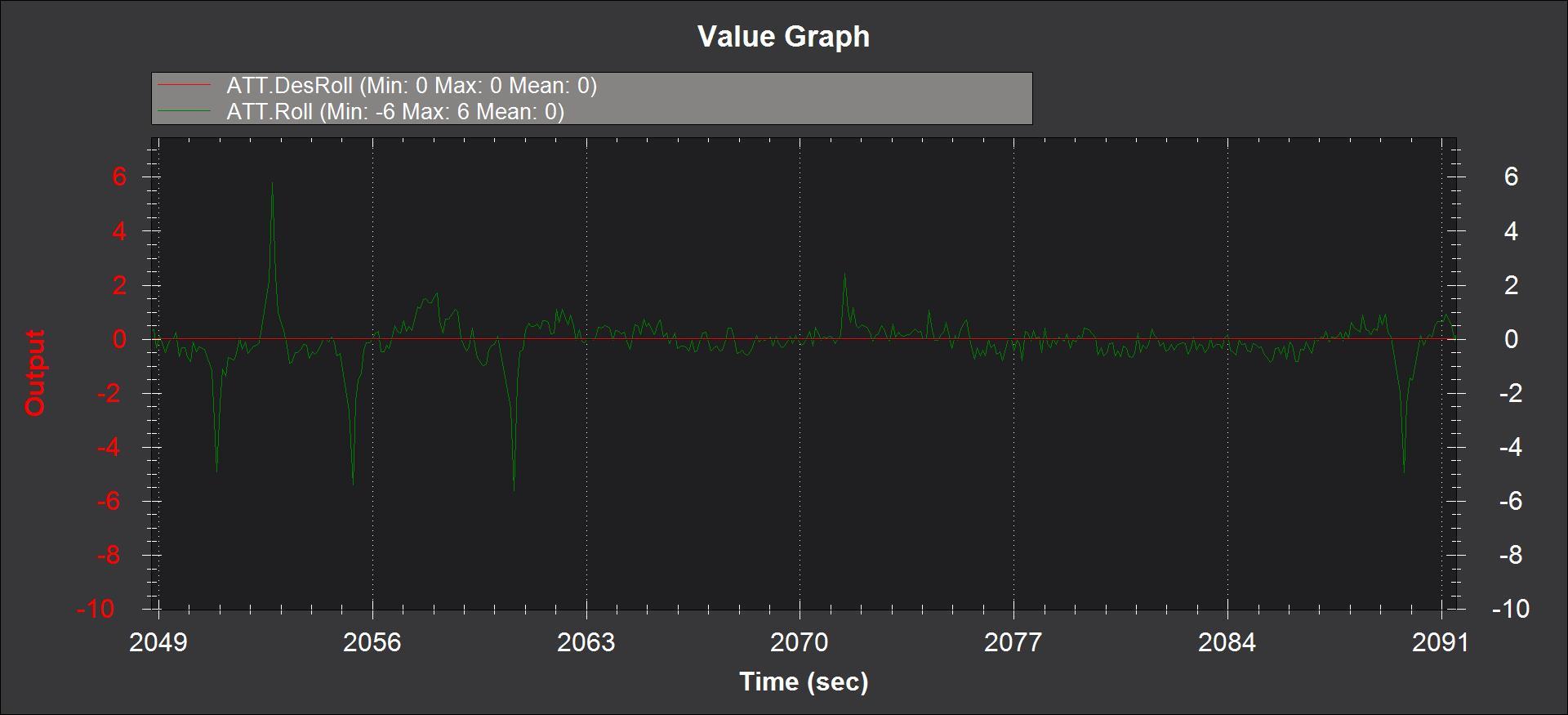
Therefore the pic of this session. With a large zoom, there are twiches to see of 6 degrees only.
Sometimes with 2 sec intervall, sometims with 30 secs.
But after landing and disarme no changes in the Params.
The autotune seems to be interrupted by something else than just the correction with the stick.
Regards, Otto
You should upload it somewhere (Onedrive, Google Drive, Dropbox, etc.) and share the link. I appreciate the images but I think Leonard would like to look at the log.
It does, I’ll ask Leonard to look at it.
Thank you verry much.
Otto
I went from 3.3.3 to 3.4.4 and noticed a huge difference with Autotune.
After initiating it, there would be a single ‘twitch’ followed by nothing. Following a slight correction for drift in the wind I noticed another 'twitch’
I therefore concluded that following each autotune ‘twitch’, some rapid stick input was required for the autotune to continue.
Hey presto autotune now completes
Sorry I didn’t read the rest of the thread but 3.4 changed auto tune for me anyway so that if you weren’t at hover on throttle input it wouldn’t start.
So once I figured it out you take off…hit autotune…throttle to hover…and it starts everytime. Just my experience.
I’ve also noticed that sometimes it doesn’t give the audible message or show the pids changed until I’ve rebooted the fc. So even it it doesn’t show update or give message the pids change after full power cycle.
Edit - by saying no audible message I mean the process appears to complete as typical be a use it stops twitching and goes to hover. This point I land and power cycle and then I see the changes.
I figured out, that on my mini quad autotune works only good when althold and MOT_THST_HOVER works well.
After i tuned althold, autotune worked for me. Before i had the same results as you.
And also a windstill envoirment is good.
BR
anton