Thanks for posting the config!!
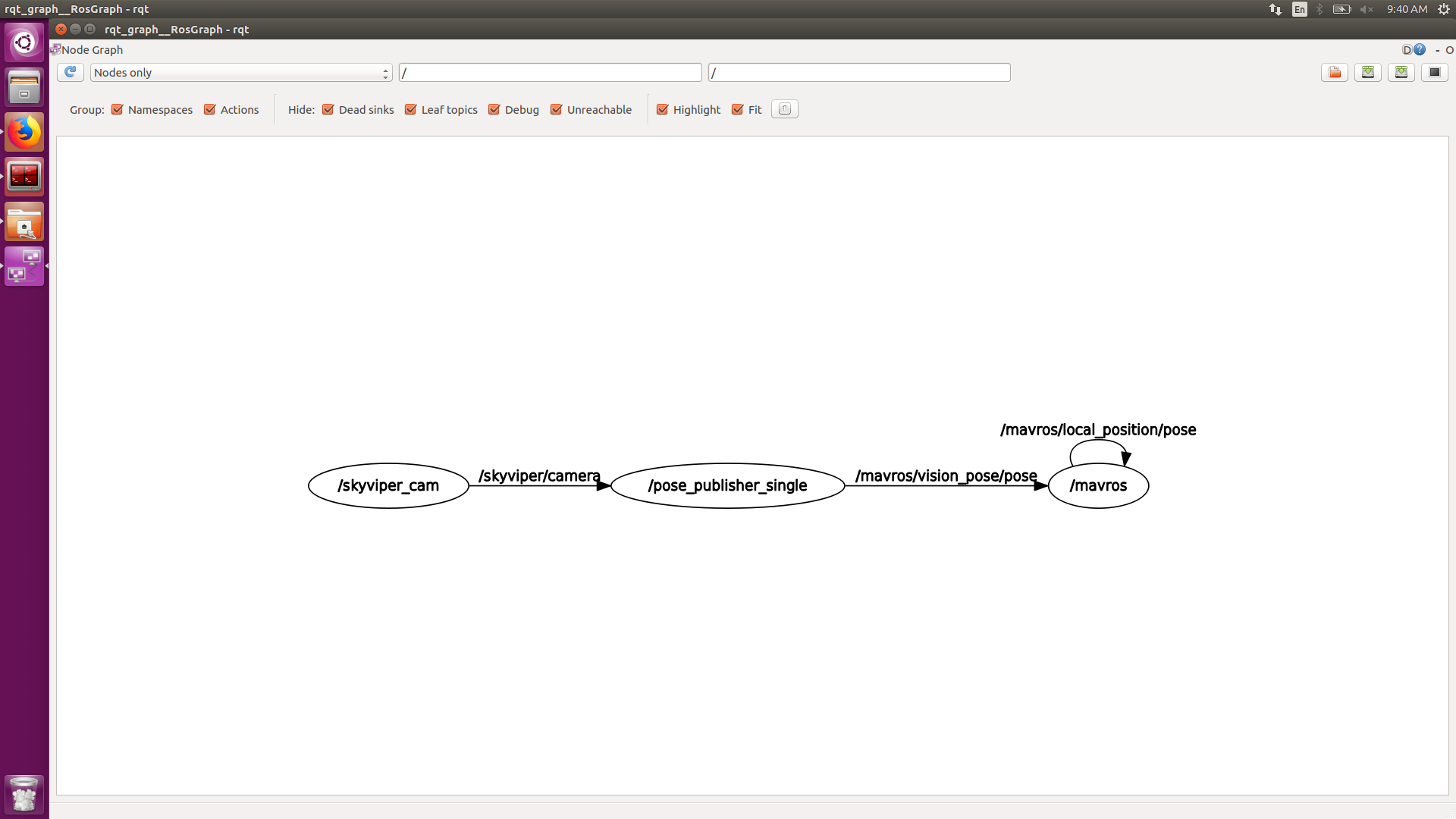
@rmackay9 and @jeff_null thanks for all the info you guys shared here, it works for my skyviper drone aswell. I see more or less the same output at /mavros/local_position/pose as my input at /mavros/vision_pose/pose.
Now I plan to use this data for hovering/controlling the quadrotor. Any lead on how I can do that?
1 Like
That is a good question;-)
Most publications are using RVIZ or MoveIt! but I have not found any references to actual GCS implementations.
Technically, tracking an Aruco tag is visual servoing and it should be controlled accordingly
@ppoirier its more like vision based control where I want the FCU to use the state estimated by the vision system, i.e. use the data in /mavros/local_position/pose for controlling its pose.
1 Like
@Subodh_Mishra, that’s really great progress! I don’t really know what you’ve got on the ground station side… perhaps something you’re developing yourself? In any case, whatever it is, you’ll want to send arm/disarm commands (within a COMMAND_LONG) to arm/disarm the vehicle. Also set the mode to Guided and then send a takeoff command (again within a COMMAND_LONG message).
@jeff_null and @Subodh_Mishra I would like to know something more of your setup.
I am doing something similar to what @Subodh_Mishra did. I have a little quad with a down-facing camera looking at Aruco marker, I have the pose estimation using ros package aruco_mapping and I publish this to mavros/vision_pose/pose. I see that the pose from /mavros/local_position/pose follow that from vision_pose but there is a drift and if I try to switch to a mode that require a 3d fix (Loiter, Guided) I got EKF Compass error.
In the Flight Controler (RevoMIni) I have ArduCopter V3.6.0-rc4, with params:
AHRS_EKF_TYPE 2
EKF2_ENABLE 1
EKF3_ENABLE 0
GPS_TYPE 0
AHRS_GPS_USE 0
VISO_TYPE 1
I would like to know if is important to set this other params and with which value
EK2_GPS_TYPE ?
COMPASS_USE ?
in this post Indoor flight with external navigation data @chobitsfan use:
EK2_GPS_TYPE 3
COMPASS_USE 0
On mavros side I have local? and vision* plugin whitelisted, I would like to know if global* should be whitelisted or blacklisted.
I start mavros using a modified version of the launch file coming with the package:
apm.launch, apm_config.yaml, apm_pluginlists.yaml
I would like to see your version of this files to see if I forgot to change something.
Thanks in advance and sorry for so much questions, if I can make it work I will do a post with all the steps necessary to replicate my work.
Ciao
Andrea
P.S:
When I start mavros I see (besides other things):
[ INFO] [1531379625.929736640]: FCU: EKF2 IMU0 is using external nav data
[ INFO] [1531379625.931855170]: FCU: EKF2 IMU0 initial pos NED = 0.0,0.0,0.0 (m)
[ INFO] [1531379625.937697776]: FCU: EKF2 IMU0 ext nav yaw alignment complete
I think this is OK, but then I see (repeated):
[ WARN] [1531380481.439952513]: TM: Wrong FCU time.
[ WARN] [1531380489.054766092]: GP: No GPS fix
and as I said if I try to switch to Loiter or Guided I see EKF Compass error.
Sorry, I can only get back to you on this after 2 months and I guess you must have figured it out by then.
But why are you switching to a mode that needs 3d fix?
I think
[ WARN] [1531380481.439952513]: TM: Wrong FCU time.
[ WARN] [1531380489.054766092]: GP: No GPS fix
is normal because I presume that you are indoor and there is no GPS there. And even if you are outdoor, it may display these warnings because you have set AHRS_GPS_USE to 0 and I don’t think you can switch to GPS dependent modes with this parameter set to zero.
I think VISO_TYPE can be left at “0” although it probably doesn’t hurt to be “1”. The VISO_ feature is for visual odometry which is different from the external position estimates…
I think that @chobitsfan used the mocap message which sends in a yaw attitude as well and so he was able to disable the compasses and perhaps that’s how he avoided seeing the EKF Compass error message.
@rmackay9 is correct. I disable all compass because of magnetic interference in my environment. (but leave MAG_ENABLE = 1, see this issue). Both position and yaw are feed from motion capture system
Thanks @rmackay9 and @chobitsfan for your answer, I will try with VISO_TYPE=0 and COMPASS_USE=1 even if using mavros/vision_pose/pose topic I send both position and orientation and so even yaw attitude.
I would like to see mavros launch and config files from @jeff_null to understand if I miss something on that side.
@rmackay9 I read that one of the key piece that gave us a good working vision_position_estimate handling was the PR “for handling the system clock differences between the companion-computer/GCS and the flight controller”.
So I was thinking that the warning “TM: Wrong FCU time” could be the cause of my problem, maybe I have to send a synchronization message before all the other stuff.
What do you think about this?
Andrea,
I’ve also seen that message on a colleague’s PC when using ROS and I think it should go away if the TIMESYNC and/or SYSTEM_TIME messages are being transferred between AP and ROS.
I don’t know for sure and I think it should work even with that message appearing but I hope we can make it go away eventually. Maybe @peterbarker has some more input.
In the mavros sys_time plugin there is handle for mavlink TIMESYNC message:
On the relative wiki they say that this is only for PX4:
http://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_time
But I see that also Ardupilot has handle for mavlink TIMESYNC message:
Anyway I am not able to go further on this front so for now I will continue with my Aruco vision_position_estimate tests ignoring the warning “TM: Wrong FCU time”.
Thanks
Andrea
1 Like
Hey guys… I am using the following param set:
AHRS_EKF_TYPE 2
EKF2_ENABLE 1
EKF3_ENABLE 0
GPS_TYPE 0
AHRS_GPS_USE 0
VISO_TYPE 1
to do vision based state estimation. The pipeline is complete, ie. I am sending data in /mavros/vision_pose/pose and getting an output in /mavros/local_position/pose but these topics are not same at all. So, I think there is an issue with the frame of reference of both these topics. For my setup the /mavros/vision_pose/pose comes from the tracking a single aruco markers and the result in the topic is the position of the drones camera in the marker’s frame. How can I get similar results in both the aforementioned topics, in other words , how can I get input topic = output topic.
When I say the topics aren’t same, I mean that the data contained in them is not same.
From what I have understood VISO_TYPE 1 is only necessary if you use the VISION_POSITION_DELTA message with EKF3, to use the VISION_POSITION_ESTIMATE message (with EKF2) should be necessary EK2_GPS_TYPE 3 and COMPASS_USE 0 in addition to the parameters to choose EKF2 and GPS_TYPE 0
1 Like
Hey @anbello thanks for your response. But can you be a little more clear and specific? Can you please tell me the parameters you have set?
Hi @Subodh_Mishra
I have the following parameters on my quad:
AHRS_EKF_TYPE 2
EKF2_ENABLE 1
EKF3_ENABLE 0
GPS_TYPE 0
EK2_GPS_TYPE 3
COMPASS_USE 0
VISO_TYPE 0
my quad stream the video from a camera via WiFi like your, only it is DIY:
- little quad (130mm) with RevoMini FC with Arducopter 3.6 rc7
- on the quad there is a Raspberry Pi 0 with Raspberry Cam streaming video to Desktop PC
- on Desktop PC there is ROS Kinetic with mavros and aruco_mapping
- the video is streamed with gstreamer and on the PC the node gscam get this stream and publish camera/image_raw and camera/camera_info topics
- on the PC aruco_mapping (slightly modified by me) subscribe to above topics and publish a camera_pose message to the mavros/vision_pose/pose topic.
[Edit]
I forget to say that i send a SET_GPS_GLOBAL_ORIGIN and a SET_HOME_POSITION messages (similar to this) before sending vision position estimate.
When all this is running and I have the quad on my hand (disarmed) with camera pointing to a marker I can see /mavros/vision_pose/pose and /mavros/local_position/pose that moves in a coherent manner.
When I try to arm and fly over the marker if I switch to Loiter mode the quad drift and is not stable.
One problem I see is a not so good video quality and when I fly over the marker the marker itself is detected intermittently and not in a smooth an continuous manner as needed. I have to work to improve the quality of the streamed video and perhaps to redo a camera calibration procedure.
Another thing that I did not understand well is if I’m using the correct transformation when I send the message /mavros/vision_pose/pose, I am talking about the ENU NED stuff as explained here under " Asserting on Reference Frames".
Hey @anbello, Do you arm your quad using the controller/transmitter or in using ros commands for mavros?
Don’t you think this should be set to 3, which means no GPS?