Hi Shawn
Thanks again and my apologies for not confirming those parameters were set.
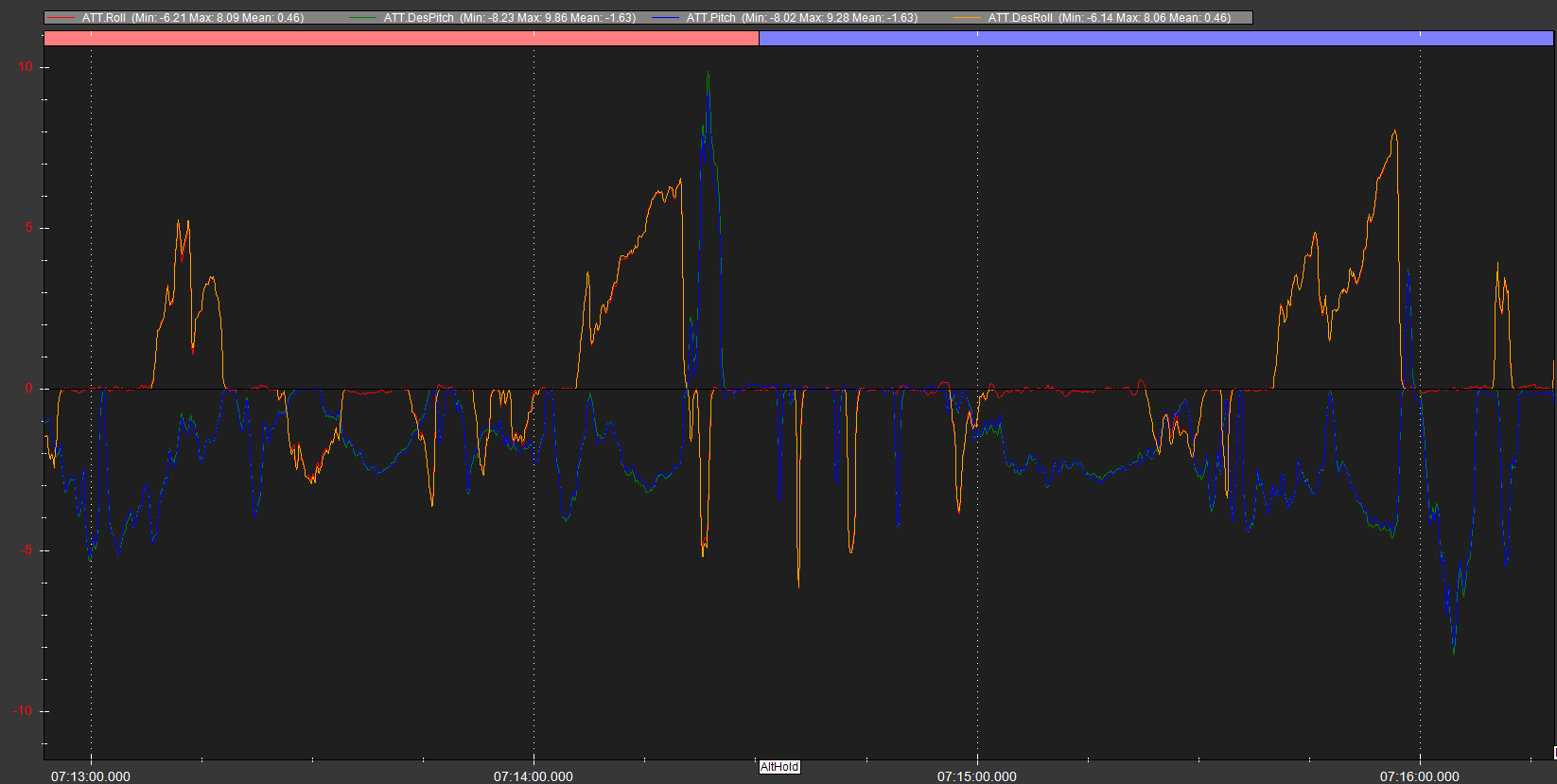
Here is the latest log of a flight in Stabilized and AltHold.
You have suggested several changes and I would like to understand the logic behind them. Earlier you mentioned you were mainly just looking for attitude versus desired attitude, and a few other things like oscillations and noisy motor outputs to smooth things out and not jumping around so much. This includes attitude control, altitude, and motor outputs.
I list below the changes and their descriptions, and I wonder if you could please expand on what you saw in the graphs that indicated that a change was needed?
ATC_ACCEL_Y_MAX from 29700 to 50000
Maximum acceleration in yaw axis
Sets how aggressive the machine is. Whys does this need increasing?
ATC_ANG_YAW_P from 9.746 to 5.0
Yaw axis angle controller P gain.
Converts the error between the desired yaw angle and actual angle to a desired yaw rate.
ATC_ANG_PIT_P, from 8 to 10
ATC_ANG_RLL_P from 8 to 10
Roll and Pitch axis angle controller P gain.
Converts the error between the desired pitch/roll angle and actual angle to a desired pitch/roll rate
ATC_RAT_PIT_P from 0.08 to 0.10
ATC_RAT_PIT_I from 0.08 to 0.10
ATC_RAT_RLL_P from 0.08 to 0.10
ATC_RAT_RLL_I from 0.08 to 0.10
Pitch / Roll axis rate controller P gain. Corrects in proportion to the difference between the desired pitch rate vs actual pitch rate output.
Pith / Roll axis rate controller I gain maximum. Constrains the maximum motor output that the I gain will output.
ATC_THR_MIX_MAN from 0.1 to 0.5
Throttle vs attitude control prioritisation used during manual flight (higher values mean we prioritise attitude control over throttle)
How does this work???
PSC_ACCZ_I to 0.26
PSC_ACCZ_I = 2 x MOT_THST_HOVER
Acceleration (vertical) controller I gain. Corrects long-term difference in desired vertical acceleration and actual acceleration.
PSC_ACCZ_P from 0.13 to 0.2
PSC_ACCZ_P = MOT_THST_HOVER
Acceleration (vertical) controller P gain. Converts the difference between desired vertical acceleration and actual acceleration into a motor output.
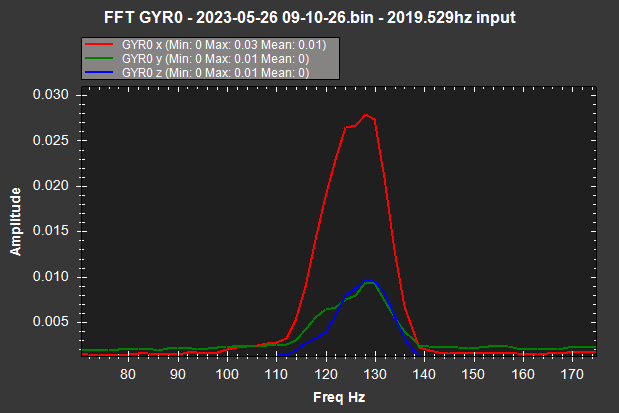
INS_ACCEL_FILTER from 10 to 20
Lowpass filter on the accelerometer signals
To find what indicates that a change is needed is a mystery to me. The FFT ACCO chart is the only one I can find which doesn’t tell me much??
INS_HNTCH_BW from 26 to 40
Any guidance on this would be appreciated!
Peter