That seems like it would make it pointless to even use the autopilot without a gov.
Ive got a different flight controller on the way for it. It is actually the same controller Aris used on his Velos UAV build so I will be able to use his parameters in the fbl as a guide there as well. It has a far more advanced gov that will work for both this test model and eventually the Velos.
@ChrisOlson you have me thinking more about a gasser as well. A little googling showed a few gasser uavs with excellent lift capacity as well as some very impressive flight times. Hmmmmm can never have enough helis!
That is pretty much correct, Bill. If you switch to an altitude controlled mode with a MODE 1 RC throttle/pitch curve and no governor it gets kind of hairy. Technically, IF you set up a different throttle pitch curve for alt hold, and tie that curve into the flight mode switch, it can be done. I’ve done it. But it’s not as “clean” as using MODE 3.
You can do idleups in MODE 3 to change headspeed - I’m doing that now with my gasser and turbine heli. Just assign a different channel that the FBL unit/governor likes to change the programmed headspeed. Since you are not changing pitch curves for a UAV heli, it works pretty nice just using the same throttle curve. The only problem we have right now with MODE 3 is that you can’t really set the POWER_HIGH for 100% like it should be because it’s linear from zero pitch to max pitch. Which doesn’t fit the non-linear response of throttle with combustion engines.
The current MODE 3 setup works pretty good for nitros - flew that config for over a year, although I used higher engine speed and just burned more fuel to make it work good. And it works ok for electrics, which typically don’t need to max out at 100%. The current MODE 3, three-point curve, will actually fly an electric with no governor better than it does a piston right now. It is all I used when I transitioned to experimenting with electrics. Tweak those three points, and with the flat torque curve of an electric motor, it works really well. It’s kind of ironic that MODE 3 was designed for pistons, but it works better with electrics ![]()
@ChadCarlin I forgot which FBL unit Aris was using, and he told me too. He was doing a lot of testing with a Logo 550, I think it was, as well. I emailed him this morning and asked him if he would be interested in testing a modified MODE 3 system with one of his test heli’s. When Bill gets that done, the more feedback we have on it, the better it will be. I’ll be testing it on pistons for now, but we should have somebody test it on electrics too. As I’m pretty sure it will fly an electric really well with no governor at all, based on the curves I’ve seen the macro produce in a spreadsheet.
I feel the electrics are really good for 600 class or smaller. The gassers are really the way to go for long-flight time heli’s, 700 class or above. The electrics are really clean operating and relatively simple to fly. The gassers come in from a two-hour flight with oil streaks down the side like an old B-29, but are best suited to long flight-time survey, search and rescue operations, sustained high-speed cruise, and long range that electrics simply cannot achieve.
Chad, IIRC, Aris said he was using an external governor speed sensor, and not an ESC signal. I’m pretty sure. With a y-cable to the ESC throttles. I can’t remember, though, where he was picking up the speed from - I think measuring the headspeed direct. He couldn’t measure it using one of the primary drives, because if that drive shut down he would have no speed input signal.
So I am assuming whatever FBL unit it was, it must be able to do a 1:1 magnet pickup on the autorotation gear. Which happens to be my preferred method for measuring rpm, instead of using the magneto magnets in the engine, or magnets on the clutch bell. A lot of nitro governors like the Align one can’t measure speeds below 10,000 rpm.
The flight controller is a Spartan Vortex VX1E. I will find out which method he is using to see rpm and be redundant hopefully.
That sounds sexy to me! ![]()
You cant beat the feel of flying a fueled heli. The connection to a living breathing machine is awesome. Nitro also has the bonus of being self lubing!
I just exchanged an email with Aris. He is using an external pickup from the mainshaft that he designed for the Velos. He indicated he is planning on making a few of them for the Velos UAV as time permits.
And yes, he is using the Vortex FBL unit.
Edit:
Aris said he is also using MODE 3 throttle control for the Velos. Because the FBL unit’s governor uses it for feedforward. I have a couple of his logs here, this is the settings he is using currently - a flat throttle curve at the bottom, going to 100% power at H_RSC_POWER_HIGH
Aris also feels a 5-point curve would be much better than the current 3-point curve, even for the electric.
Nitro also has the benefit of being self-locating. Just follow the smoke trail and you’ll find the heli ![]()
Ok so if I do this though I lose the option of having a mode for flying 3d correct?
I will have to get with him on this and see if I can either have him make me one or get instruction on making one.
Nope. It should work fine. Most governors have idleups on a seperate channel, and just set up your MODE 3 throttle pitch curve for 3D instead of UAV (using more negative pitch and more throttle in the negative range), snap it into the highest idleup, and it should work in Acro. And it will still work for UAV too - just idle it down for UAV use and don’t run the head as fast.
Most governors have three different governed speeds that can be changed with a seperate channel. I would be very surprised if the Vortex doesn’t.
Ok I get it now, so no matter which mode I use, when I go to acro it will still be a passthrough and I’ll essentially have a stunt mode or a safe mode to take control if things dont go right. I will work on setting up mode 3 today.
When you set up the rest of it, if you use a lot of negative collective to be available in Acro, you can limit the collective range in Stabilize if you want with the IM_STAB_COL params. Those four parameters set a collective pitch curve for Stabilize flight mode and they correspond to stick bottom (COL_1) to stick top (COL_4), and 2 and 3 are 40% and 60% stick, respectively, so you can “flatten” the pitch curve a bit at mid-stick, and adjust 2 & 3 so it hovers at mid-stick in Stabilize. That will prevent problems with sudden collective change when you switch from Stabilize to the altitude controlled modes.
OK @ChrisOlson I’ve got it all set up per your instruction using mode 3 throttle curve. I will have to fly it to see where exactly it hovers on collective before I set the collective curve for stabilize. Beyond that I only have one concern. Everything works correct by what I can tell. Disarm kills the engine, armed it is where it will idle, i flip the switch and it slowly spools up, after it reaches that point the throttle servo moves back and forth as it should, except when I hit 10% or below on the collective the throttle shoots back to idle. I know your first thought may be " you should never need full negative collective" however in fact I do full negative inverted climb outs all the time.  It does this in all flight modes. One other oddity is when I flip into stabilize it gives full right rudder. What are the remedies ?
It does this in all flight modes. One other oddity is when I flip into stabilize it gives full right rudder. What are the remedies ?
Well no, that’s not my first thought. It should not do that. On the bench, only Stablize or Acro are going to work. If you change to Alt Hold, Loiter, etc., the servos stop responding.
If you can export your params so I can take a look would be the best. Since you had it armed, there should be a .BIN file on the microSD card too, that will have the params in it, as well as what was logged when this happens.
Param file
Bin file
Chad, I don’t see anything wrong with either the settings or how the throttle curve is working.
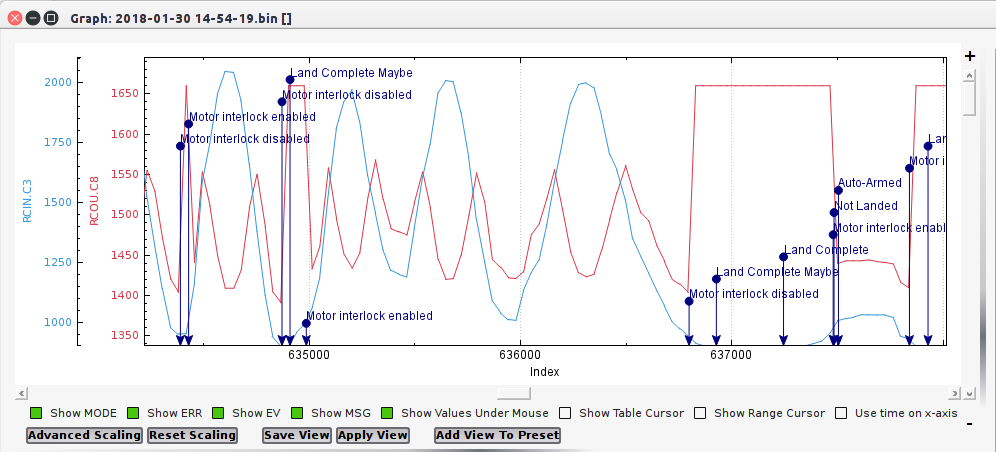
85% throttle is around 1430 pwm on the RC8 OUT. Idle cutoff is around 1650 pwm. As shown in the graph, I see collective either top or bottom, and the throttle increases to 85%. Until the motor interlock disables, and I don’t know if you did that, or that stupid button did it. I hate that safety button with a passion and always disable it on my heli’s.
But anyway, I do not see anything abnormal there, as far as the Pixhawk output on SERVO8.
Il make a quick video to show you what its doing
Chad, try hooking your throttle servo direct to the Pixhawk and bypass the governor/FBL unit, and see if the FBL unit is doing that for some reason.
If you already have it bypassed, then arm it, do what you just did, disarm it, and pull and post that latest log. That log should be shorter than the other one I looked at, which looks like it had a whole bunch of experimenting and testing in it.
Yeah that was the whole mode 3 set up I did haha. Here is the new bin file. Still does the same thing plugged directly to the pixhawk.
https://www.dropbox.com/s/z87umrhwp4niliz/2018-01-30%2019-48-12.bin?dl=0