yes, quite a few people are using it successfully.
At this point I would normally attach a Saleae logic analyser to trace through the signals, but if you don’t have that, then I’d suggest trying different uarts on the L431 for the telem feedback.
The ESC_TELEM_PORT setting is as follows:
0 : USART1
1: USART2
2: USART3
try attaching to the RX port of the other uarts with the right ESC_TELEM_PORT and see how it goes. Note that you need to restart the node on that change.
@tridge Were you able to replicate the issue above where, after your patch telemetry still doesn’t work correctly.
Am I miss understanding the bitmask settings?
you need to set the SRV_BM for servos, quite separately from the ESC_BM for ESCs. The DroneCAN protocol for servos and ESCs is totally different, so both need to be set separately
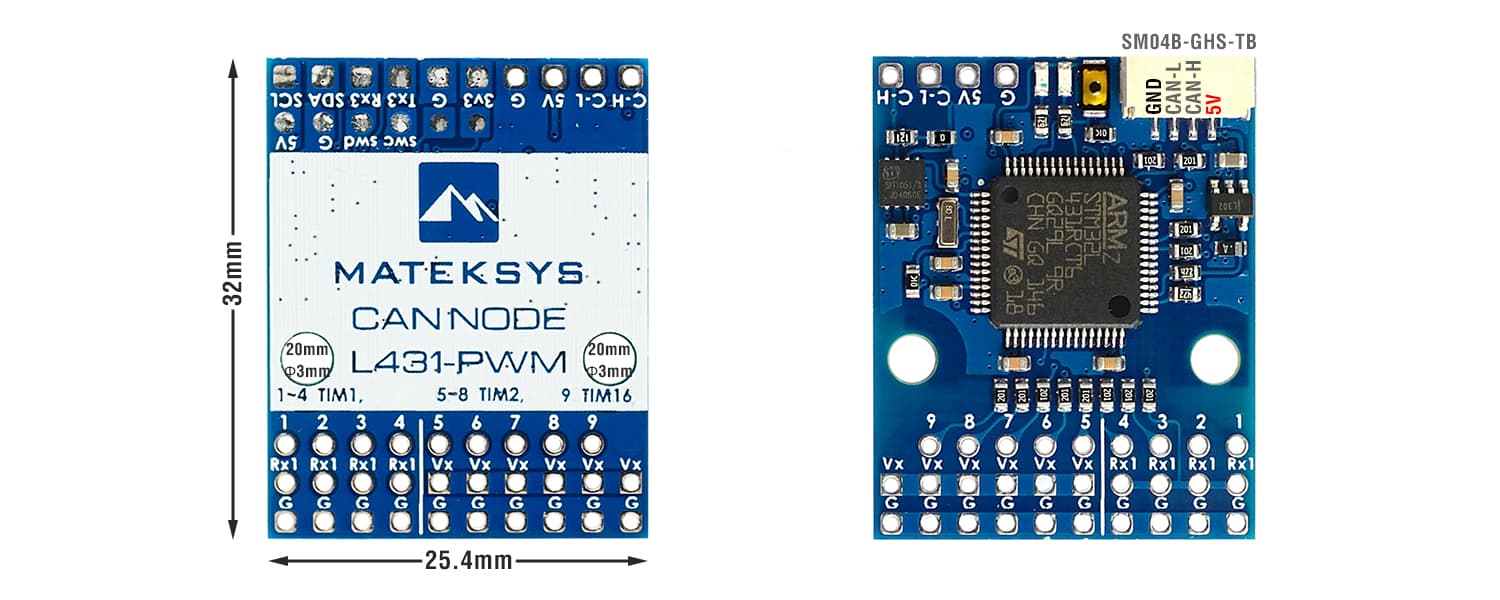
It is setup in the same way as the existing MatekL431-DShot described above.
The big advantage is it makes wiring easier. The 6 servo connectors have a common power rail on the middle pin, and the ESCs middle pin is setup to go to USART1 RX, ready for DShot telemetry.
More details here: https://www.mateksys.com/?portfolio=can-l4-pwm
thanks @Sampson !
Thanks Tridge, very interesting post.Only just stumbled across it.
Given that some new FC’s come with digital inputs for data like battery voltage and current, could this unit easily be setup to use an conventional MP for example and then send digital signal (converted by Matek-board) to an CAN input as found like on a Pixhawk 6x ?
…or is this not supported yet on the firmware side?
I’ve been trying to setup a PWM ESC to run off the L431 node for some time but I can’t seem to get it to work. If anyone has any ideas on what I could change i’d be grateful!!
The current autopilot settings i have are:
CAN_D1_UC_ESC_BM 15
CAN_D1_PROTOCOL 1
CAN_P1_DRIVER 1
The current node settings are:
OUT2_FUNCTION 33
OUT5_FUNCTION 34
ESC_PWM_TYPE 1
I’m currently running the Default firmware, the MatekL431-Periph so I don’t seem to have the OUT_BLH_MASK that I’ve seen mentioned, is this a problem for using a PWM ESC? I’ve managed to get several pwm servos working fine but I’m a bit lost here
i will be using CAN servo which has 4 pins, but the MATEKSYS CAN-L431( CAN-L4-PWM) is only 3 pins (signal,Vin, gnd). Is there a way to connect the feedback cables to CANBUS or this module is not compatible with feedbacks? Any suggestion would be appreciated.
I’m trying to get ESC telemetry data from Hobbywing X8 motors. I have a few questions about this topic. I think X8 Dshot is not supported, but it has ESC telemetry feature in it. How should I proceed in this case? I would be glad if you help. I’m going to do 3 motors tests. All 3 have them according to their individual RPM and power consumption values.