I have updated firmware to bshot version, yet no “MOT_PWM_TYPE” or any “MOT_” parameters shows up on the list.
No, you need to look into the SERVO param list as I have stated in previous post- not MOT_ param list. Look for and set the params I have mentioned.
1 Like
You are mixing BDShot and DShot in your head, they are two completely different things.
DShot is a digital ESC protocol that replaces PWM/OneShot/MultiShot etc. You need it to enable the motor telemetry the way you want. It is also superior to the analog protocols in other aspects so it should always be enabled if possible, even if you don’t want motor telemetry. Specifically, you want to enable DShot 600.
BDShot is Bi-directional DShot (you still need Dshot 600 enabled for it), which allows you to receive motor telemetry WITHOUT an additional cable from the telemetry pad on the ESC to a UART on the FC. So it would indeed make sense for you to use it, but it needs to be set up differently than regular DShot telemetry.
Read this: ESC Telemetry — Copter documentation
And listen to what @Ferrosan says ![]()
1 Like
yes, I already read that page, that is the page where it tells to set serial protocol to 16 near top of the page, then tells to set serial protocol to 2 at the bottom of page. and I still remain confused.
I updated to bdshot firmware per Ferrosan’s suggestion.
are you saying bdshot firmware is not necessary for dshot ? if you are not interested in bidirectional dshot?
also, I already modified servo paramerers too.
If you have set the parameters correctly you will see these messages but for your flight controller and the output chanell you have assigned for HeliRSC shown as Dshot.
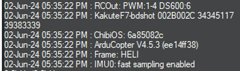
In this example it’s Chan 6
@Ferrosan gave you the parameters to set.
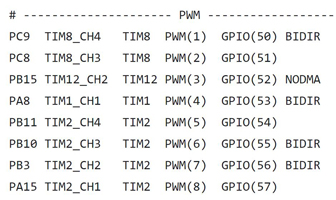
Also as he has noted you need to pay attention to the timer groups and BIDIR capability. These are yours:
1 Like
Hi, that is not correct. It recommends to use protocol 2 (MAvlink2) on the serial port you are using for main telemetry stream (through RFD/WiFi for example) - not for the serial port you are using for ESC telemetry.
@Ferrosan I am not really a Trade Heli guy but after enabling BDshot the next step would be to configure the RPM reference (type) to ESC Telemetry and configure the channel mask?
Hi @dkemxr Dave, I normally set the channel mask first. Once correct ESC telemetry flow is checked, I set the RPM sources. For RPM I use ESC telem and Hall sensor on the one-way crown of gearbox (if clearance allows).
1 Like
ok, now some how I managed to make the motor run, and I’m pretty sure it is using dshot600,
and not PWM signal to do so, because I set the battery monitoring to ESC, and it’s not complaing of low battery.
however, if I arm it with channel 5 (mine was set up that way, which is normal CRSF way), the motor turns in reverse direction at full speed (good thing it was rotating in reverse direction, otherwise the main rotor would be turning too). the motor behaved normally under PWM signal (same Flycolor ESC).
why would this happen?
as I suspected, it’s rotating in reverse direction at full speed, when throttle is all the way down,
and slows down and stops when throttle channel is in the center position, then speeds up again in the other direction as throttle increase.
do I have to program the ESC some how?
It would be better to post a log of this, we really need to look at your current parametrization. Please, remove main and tail blades while doing benche testing ![]()
1 Like
Is it or isn’t it? I gave you the way to determine that.
yes, blades were off, but you can still get hurt by the rotor head, if the motor turns at full speed unexpectedly.
I have figured it out now. it was 3DMask thing that cause the reverse direction problem.
also, ground wire from ESC to FC was not necessary after all.
The ESC comes by default with a yellow/black twisted wire (or at least it should). There is a reason for that…
the RPM shows up on Mission Planner / status / esc1_rpm along with curr , volt , temp.
but I am stumped on how to display this RPM value on Yaapu.
and why is there esc1 through esc12 ?
Just set RPM1_TYPE to esc telem, select esc channel according to your setup.
Then in Yaapu config enable RPM.
I have done that already.
is esc channel same as RSC channel ? or does it mean something different ?
yes, tick the esc channel corresponding to RSC.
I think that did the trick. Yaapu now shows RPM. thanks.
however, I think I still have to change some values to show rotor RPM.
I think it’s showing motor RPM if the motor was 14 pole.
I’m not even sure how many poles my motor has, and also need to find out the pinion gear tooth count and main gear tooth count. which is not as easy as one would assume. heli manuals don’t give these kind of informations often.