OK great. The FF is looking better now although it’s only down to 0.05 (I thought lower would be required). I think we can fix the left-right asymmetry with higher P and I terms. So although I suggested they should be lower, I think they can be much higher actually now. Perhaps try:
ATC_STR_RAT_P of 0.02 (currently 0.002)
ATC_STR_RAT_I of 0.02 (currently 0.0015)
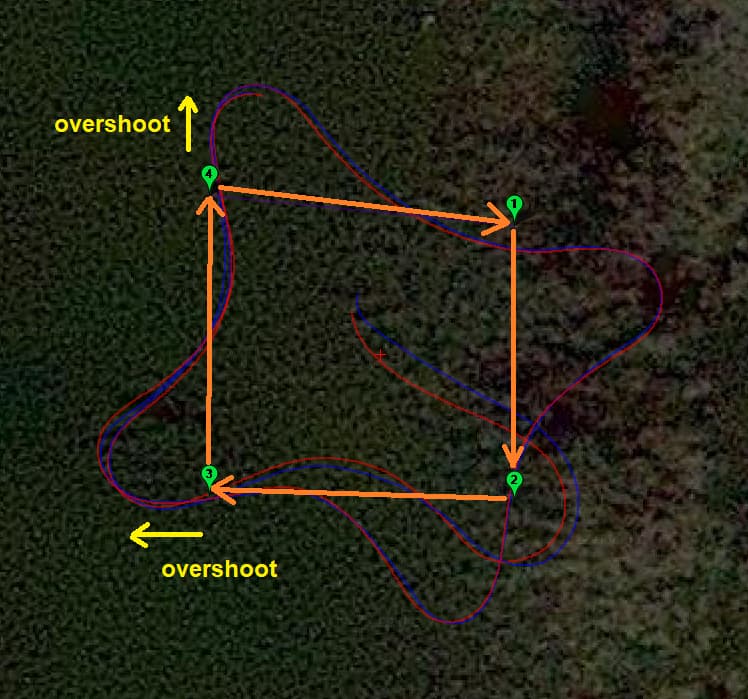
Onto navigation…to reduce the overshoot at the corners the vehicle either needs to slow down more or it needs to turn faster.
WP_SPEED_MIN has been set to 4m/s so the vehicle is being told not to slow down below this speed. So one solution is to reset this back to zero and see how it does.
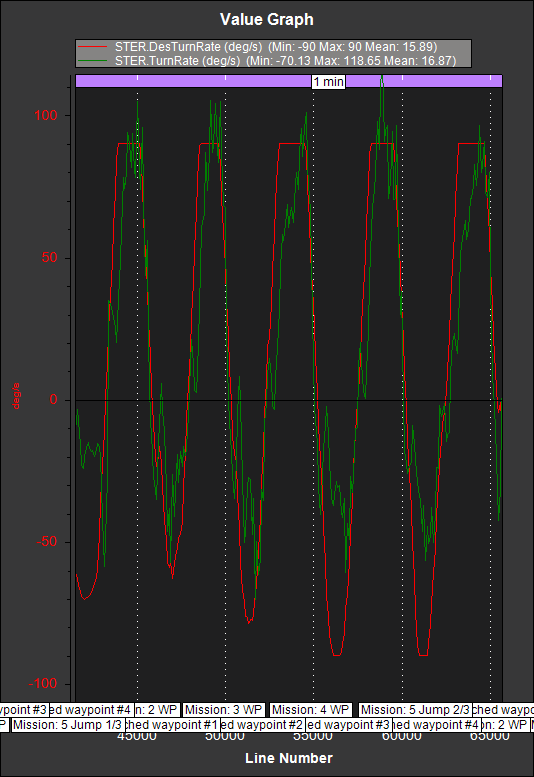
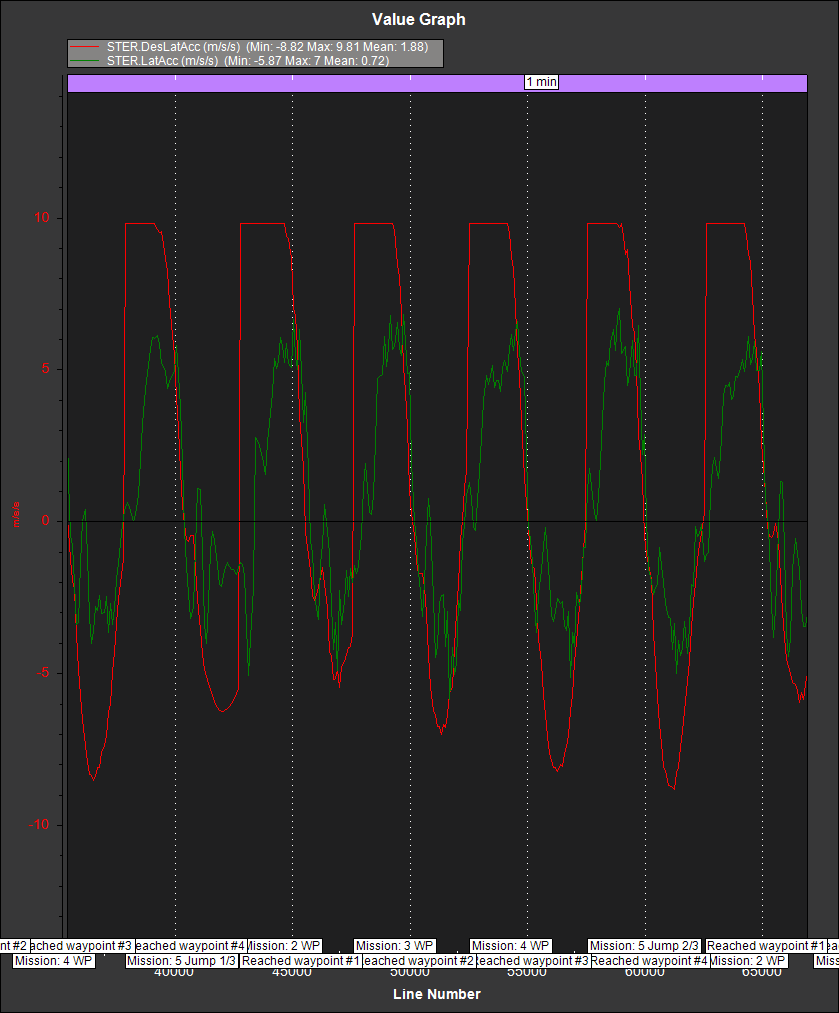
Re turning speed, there are two limits, ATC_TURN_MAX_G (currently 1G) and ATC_STR_RAT_MAX (currently 90deg/sec). It turns out that in this case it is ATC_STR_RAT_MAX that is the issue.
The vehicle looks like it’s capable of turning faster because the servos are not at their maximum. I’m not sure though maybe it will flip if it tries to turn faster?
Thanks Randy. I will raise the P and I and see how it does. I want to keep the wp_speed min at 3-4m/s because I dont want it to slow too much when there are lots of waypoints in close proximity on the winding river. It can absolutely turn harder, in smooth water it shouldn’t be too much of an issue with skipping. When it does turn to hard thats what tends to happen is it slides across the water and spins out, kinda like a car doing a donut when the tires break traction, in this case its the jet that looses the water feed. So I will start rasing rat_max and if it skips ill slowly work it back down.
I’m excited it feels like were making progress. I can’t thank you enough for all your help. When I make the video about this project i’d like to mention you. What is your title/position on the ardupilot project?
Great stuff. Sure, I’m the maintainer and release manager for ArduPIlot’s Copter and Rover code. AP is a team effort of course with lots of developers … I’m responsible for deciding which features are included and also for ensuring we deliver reliable code to the community.