Hi Bill, @bnsgeyer
I’m about ready try your Autotune on a 700. Can you post firmware for a CUAV Nora H7 autopilot, please?
Cheers,
Steve
Hi Steve @Steve_Mitchell
Thanks for continuing to test! I will compile the firmware for that board and post it to my release page tonight.
@JoshW @Murdoch @ZvikaF Did anyone get a chance to test the autotune firmware?
I am working with Randy to get the Tradheli autotune into 4.2 which is planned for release in April 2022. So I don’t anticipate any new versions coming out for testing until we release the beta for 4.2. I think it works well enough to help users tune and it provides tuning experts the tools to further refine their tune.
2 Likes
Hello Bill @bnsgeyer
Just got the new correct main shaft last week, hope to try it on the following week, if weather prevails.
Steve,
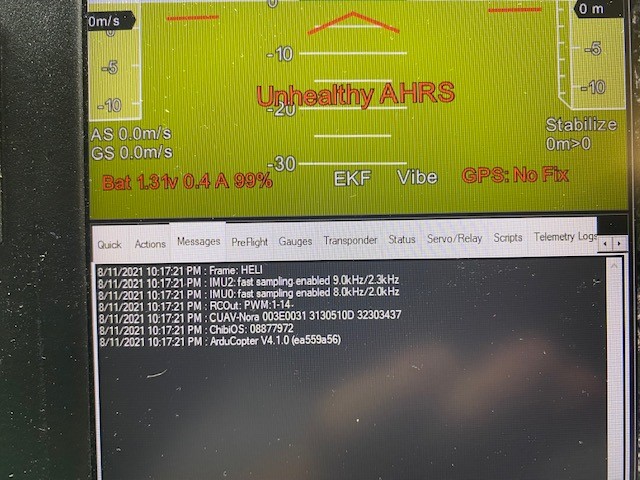
Please provide a screen shot of the board info that is shown in mission planner when you connect to your heli. I don’t show that exact board type in my list of potential targets.
Thanks,
Bill
Bill,
Here you go! I believe it’s similar to CUAV X7 controller.
Bill,
Was this what you were after or do I need to find a different model number?
Cheers,
Steve
No. That’s perfect. CUAV-Nora. That is one of the targets boards in the list
1 Like
@Steve_Mitchell @ZvikaF @JoshW @Murdoch
I have updated all of the binaries so that the code has been rebased onto 4.1.1 stable. Please load these new binaries onto your heli’s if you plan to do testing of autotune in the future. For your convenience, here is a link to the release page on github.
3 Likes
Thanks Bill, looking forward to trying it out on something bigger.
Hi Bill, awesome work!
I have cuav x7 pro autopilot, can you compile your last version for i try it on my 700 ?
I want to use it at my own risk and share all the logs of flights make with auto tune
@kuspower thanks! I would be happy to build you a binary for your board. Unfortunately I won’t be able to do that until later this week as I am away from home currently.
Sounds great!
Ok, thank you for your feedback.
I hope to get it next week for test
Thank you
@kuspower i have built the firmware for CUAV X7 controller. You can download it on the release page.
Thank you so much I will try it this week and feedback logs here
There is possible you add max angle allowed for autotune ? On larger heli with slow max angular speeds is too much do it with 20 deg it could be great to be able to limit angle to 10 deg…
@kuspower the max angle of 20 deg is used for only the Feedforward test. For the rest of the frequency sweeps and dwells, it uses very small angles of 5 deg or less.
If you haven’t tried it yet on your heli, please do so and let me know what you think. I have designed the autotune using a synergy 626 and I don’t find the 20 deg to be scary on that size heli. You bring up a good point that with the larger heli’s, they may not be able to achieve the 50 deg/s rate that is targeted for the feedforward test. So it will be good to see your logs and make a determination from that.
Thanks in advance for testing!
Ok so for larger size heli its better to manually tune ff and do autotune only for rate p/d gains and ang p gains.
No. The FF tuning test works better with larger aircraft, at least from my experience.
@bnsgeyer Hello Bill,
One question to your parameter list in your instructions for autotune2 on page2.
HNTCH_HMNCS - 11 (for two bladed rotor system)
What value do I need for a 3 blade and for a 4 blade head?
Thank you for your help.
BR
Heri
@heri The way vibrations work on helicopters is that you have the 1/rev which is at the rotor speed which is due to not having the rotor balanced perfectly. from there vibrations are multiples of the number of blades. So for a three bladed rotor system, you will want to notch the 1/rev, 3/rev, and 6/rev. So the value of the bit mask for that parameter should be 37.
@kuspower have you had an opportunity to try out the autotune code?
1 Like