If using Auto-Tune instead of manual tune should ATC_ACCEL_X_MAX still be set according to the
recommendations based the Heli size?
" The final setting for ATC_ACCEL_x_MAX parameters will depend on the size of the helicopter. Large 800-900 class machines will typically be in the 36000-52000 range; smaller 450-500 class machines will typically be in the 90000-110000 range"
If so, should I set ATC_ACCEL_X_MAX before or after Auto-Tune?
@Shotfire Doug,
I am not a big fan of these recommendations but just don’t have better guidance at the moment. Instead of changing the accel max, I would recommend changing ATC_INPUT_TC. This parameter adjusts how quickly the requested attitude is achieved. Based on my experience thus far I would make these recommendations.
Use 0.25 for 800-900 size
Use 0.20 for 500-600 size
Use 0.15 for 450 and smaller.
These only affect stabilize mode. You will need to adjust max accels if you want to slow down the response of the rate command axes like yaw in almost every mode and roll and pitch in acro.
Keep your accel max parameters up above 60000 unless you have a structural requirement to limit acceleration or are trying to slow down the rate command axes. I would not suspect that to be an issue for these sport helicopters. They are built pretty well for the stunt flying.
It is important to have the Max accel set high during the rate P and D tuning so that the response is not affected unless again there is a structural need to reduce acceleration. Perform the angle P tuning with the ATC_INPUT_TC and accel max values you plan to fly with.
Hopefully that helps. I have another method that I am experimenting with for the angle P tuning that will hopefully help. But for now the current autotune angle P tuning should suffice.
Hi Bill, @bnsgeyer
Try for several times but it just dont tune sucessfully the FF for both Pitch and Roll.
I check the logs after, the FF dont get close to 0.17 and also checking the 2nd sweeps they are not equal.
When looking to the old Autotune logs and these today maybe they change the outcome of the P and D tuning.
yes, it appears that the feedforward tuning is not quite perfected for all heli sizes. I would estimate from the FF tuning and the sweeps that the pitch FF should be set to 0.14. The FF tuning of the roll axis was really difficult to determine as well. The value of 0.179 seemed to work fine. I think the best way to tell is to make some sharp stick inputs in a hover and we can see how much the P gain is helping initially. then we can adjust from there.
The Rate P and Rate D gain tuning did a good job. Your manual tuning was pretty good. I know I may have recommended 2.0 for AUTOTUNE_GN_MAX but 1.7 might be better. Here are the values for pitch and roll that I recommend you use instead of the saved values.
ATC_RAT_PIT_P 0.059
ATC_RAT_PIT_D 0.0017
ATC_RAT_RLL_P 0.044
ATC_RAT_RLL_D 0.00045
As you can see you did pretty well with your manual tune. The Roll D gain in your manual tune was too high.
Conduct a flight in stabilize mode with the settings I recommended above. make some quick inputs to 20 deg angles in pitch and roll. we can pull the logs and look at how the FF looks. Lets finalize the FF gains because they can affect the angle P tuning. Then you can run the Angle P gain with the AUTOTUNE_GN_MAX at 2.0 for pitch and roll. If you want to run the Yaw tuning, you can also do that.
I’m very pleased with how well it did on the Rate P and D gains. i think this shows that conducting the tests with zero rate P and D gains to begin is important. I will have to think of a better approach for FF tuning. Thanks for Testing!
@Pedro_Claro
In looking at your flights where you made inputs in stabilize mode, it looks like the pitch FF needs to be increased. You can see below that the P term continues to go in the direction of the FF throughout the peak FF value and back. You want the P term to reverse around the time the FF term peaks.
So I would recommend setting the Pitch FF to 0.16 and the Roll FF to 0.18. I didn’t expect you to run the pitch and roll P and D term tuning again. I was happy with the values I had chosen from the last set of data you provided and wanted you to use those values.
The yaw axis P and D tuning went well. I think the Angle P tuning should help tighten up the desired and actual heading values.
So change the FF terms as I suggested above and change the Pitch and roll P and D to what I recommended in the previous post. Then you can perform the angle P tuning for all 3 axes.
I was just doing repeatability testing for the Autotune. Now that I learn that FF and P gains are the same I got from manual tunnning I plan to do more repeatability checks to get the sense in how reliable the Autotune is. Going to check today and briefly bring here the results.
Thank you!
4# Autotune Roll Angle P 4# Autotune Pitch Angle P 4# Autotune Yaw Angle P 4# Stabilize Final Check
Here is the Angle P for Roll, Pitch and Yaw. Dont know if they are OK but the Angle P that i arrive was also the minimum, but as I was below the recommended in the Wiki I was never certain. The Yaw arrive at 10. I never manually tune the Yaw P so no idea. But the Heli is really great to maneuver as it is now, specially the yaw. Always have difficulties to find the yaw sweet spot, so I can only be happy with the Autotune.
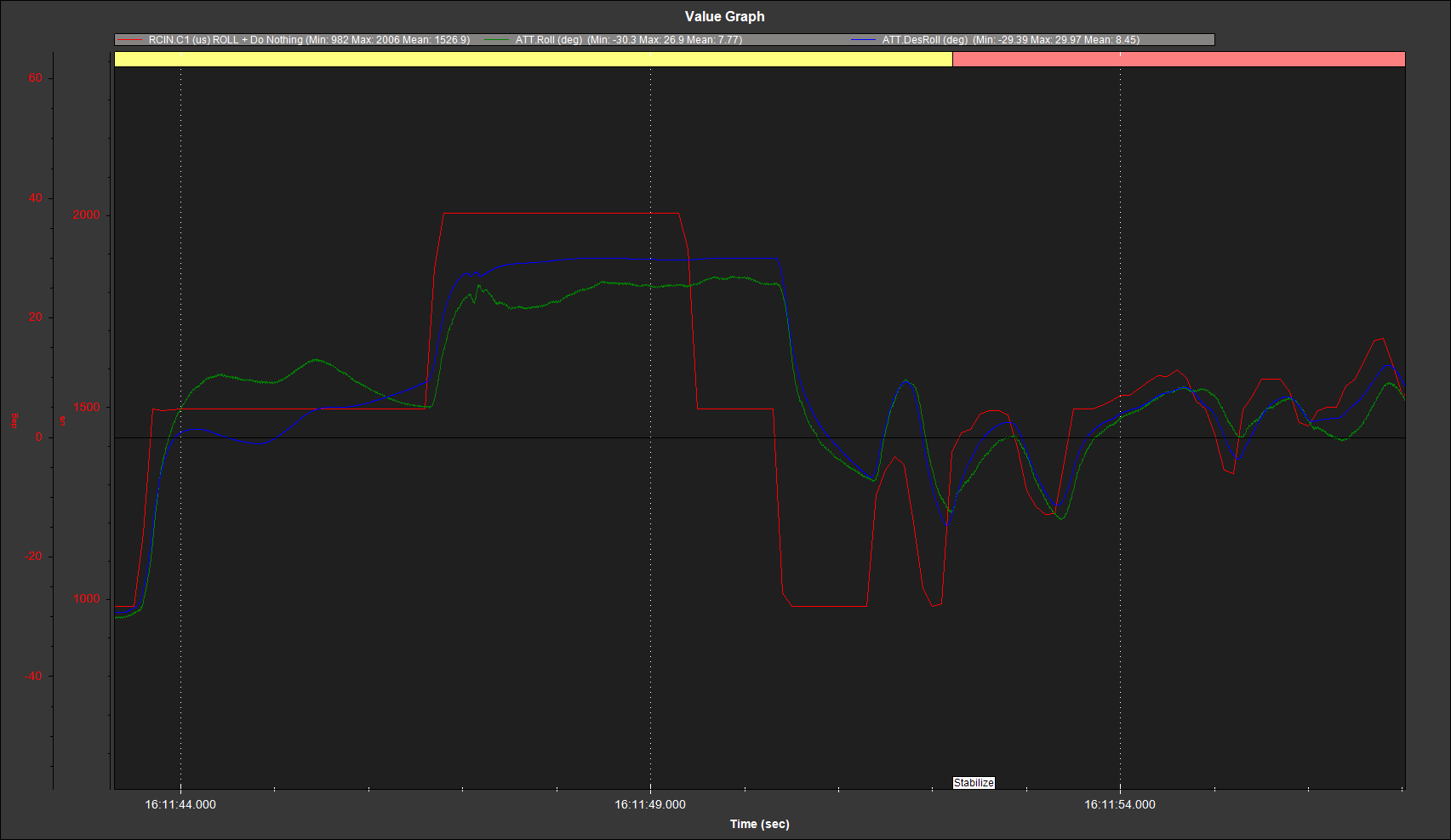
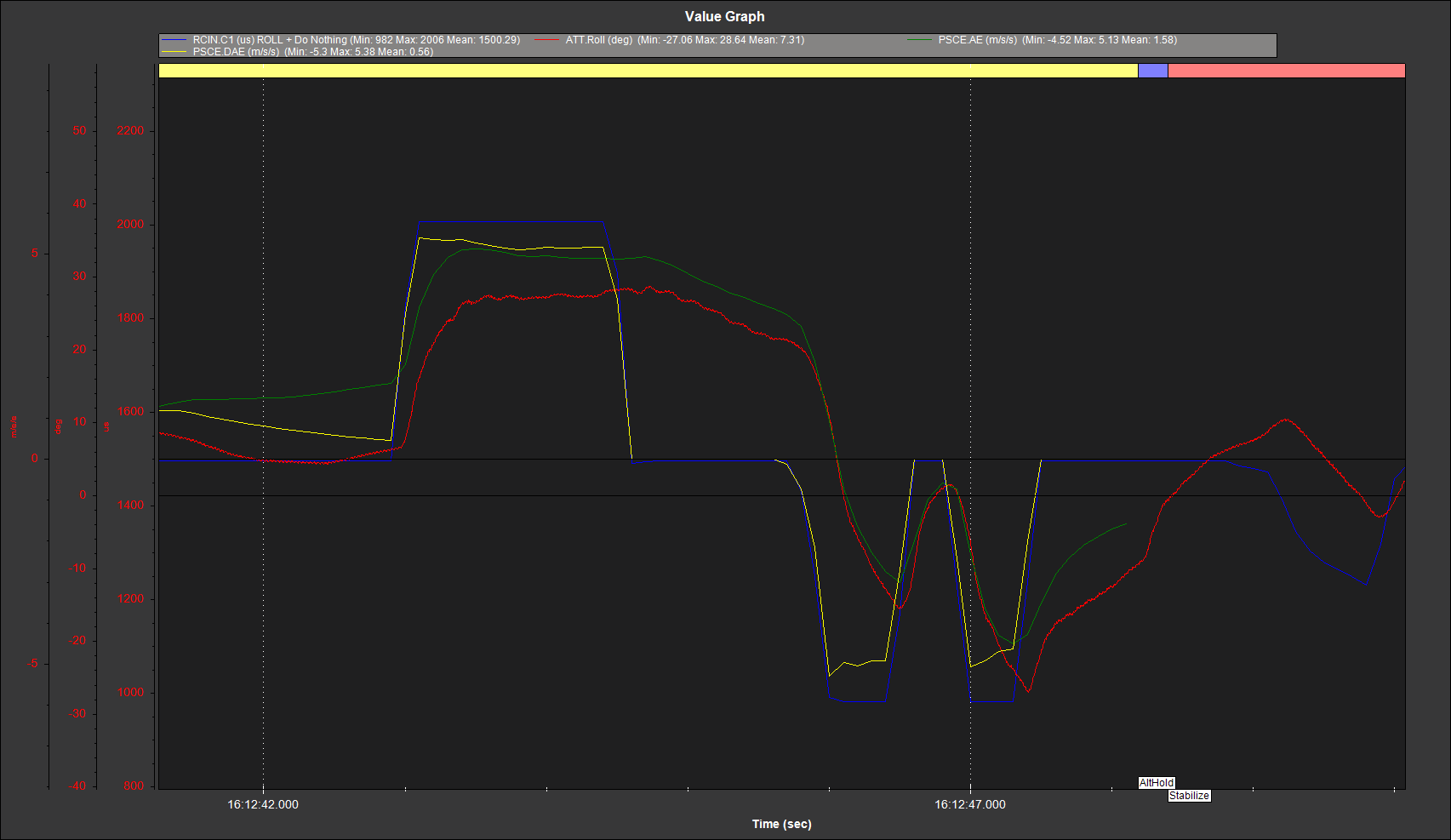
Well during the Stabilize final checking, I went to check also the Loiter mode and faced a bad experience, when commanded right and centered the joystick, the helicopter maintained the attitude, only centered when commanded left. I hope that you can help me to find the root cause of this as my confidence level in the Loiter is again very low
I will have to look at this in more detail but loiter does not command deceleration immediately. There is a brake delay that allows the aircraft to coast for that time before decelerating the aircraft to a stop. Have you used loiter much in the past? Many people use Poshold but I don’t know what they like about it. Since Leonard changed loiter back in 4.0, I think it works much better.
Correct, but it was too much and only happening going to the right side and not to the left. In the log above we can see it hapening 2x when I turn fast to the right. Normally I dont fly in Loiter because I crashed a couple of times and some leans also, so many bad feelings
I am going to remove the brake delay and do some more checks. Thanks for the support!!
Regards,
Pedro
Hi Heri, @heri
Here is the bin file with the issue in Loiter.
After you load the bin click on “show parameters” then you click on “Compare” and compare with your parameters.
I compared your loiter parameters with my loiter parameters from my Hughes 500 with Mikado Logo 600 SE mechanics. With this helicopter I fly a lot and almost only in LOITER.
I have set LOIT_BRK_ACCEL to 150. The higher the value, the faster a movement is slowed down when you put the sticks in the middle. This could definitely make an improvement already if you increase this value.
My LOIT_Speed is also lower and the ANG_MAX is smaller for me. But that should not play a role here.
My DELAY is also set to 1 second. I have also flown with 0 seconds. But that was too fast for scale flying in the reset reaction. Setting it to 0 should therefore improve or solve your problem. In my opinion, this is the cause of the described behavior.
If I remember correctly, the heli always braked immediately with 0 delay, which bothered me.
The delayed braking you have to take into account in your flying style.
It is a pity that you cannot enter a small value, e.g. 0.5 seconds, but only whole seconds. 0.5 seconds would be a good compromise.
As you know, I only fly scale models. Therefore, I usually do not make sharp or fast stick movements. In your example you move the roll stick very fast and “extreme”. I have not had situations like that in my flying style.
I’m curious what happens when you set the delay to 0.
Thanks for your feedback!
Yesterday I tested with 0 delay, and did not observe the issue. Could be that this delay is the root cause.
Well I was really aggressive testing the Loiter, anyhow I never liked the flight harmony of the heli in the Loiter mode, doesnt look natural. This was one thing I could not catch you when some time ago you said you prefered this mode for the scale helis, but now I got you, as you fligh them slow and this makes sense. The loiter in a 450 size looks a bit awkward, but this is just my impression .