Thanks for the ping. I have been planning to add support for TorqLink for some time. I have too many projects on the go at the moment but I think in Nov/Dec I could get back to it. I don’t have the hardware which makes it very difficult to work on the driver so if you have any pull with anyone willing to send me some that would be great. In any case I think trying out the lua script developed by Nubbish would be a good start.
Hi Victor, Are you able to share how you got the cruise motors working? We have been trying to us the RS485 to ttl modules as described in the Ardurover Wiki and Randy has graciously been helping as much as he’s able but we and others have only had partial success with the older cruise motors but no problems with the Traveller series of motors which are supposed to share the same protocol. Cheers.
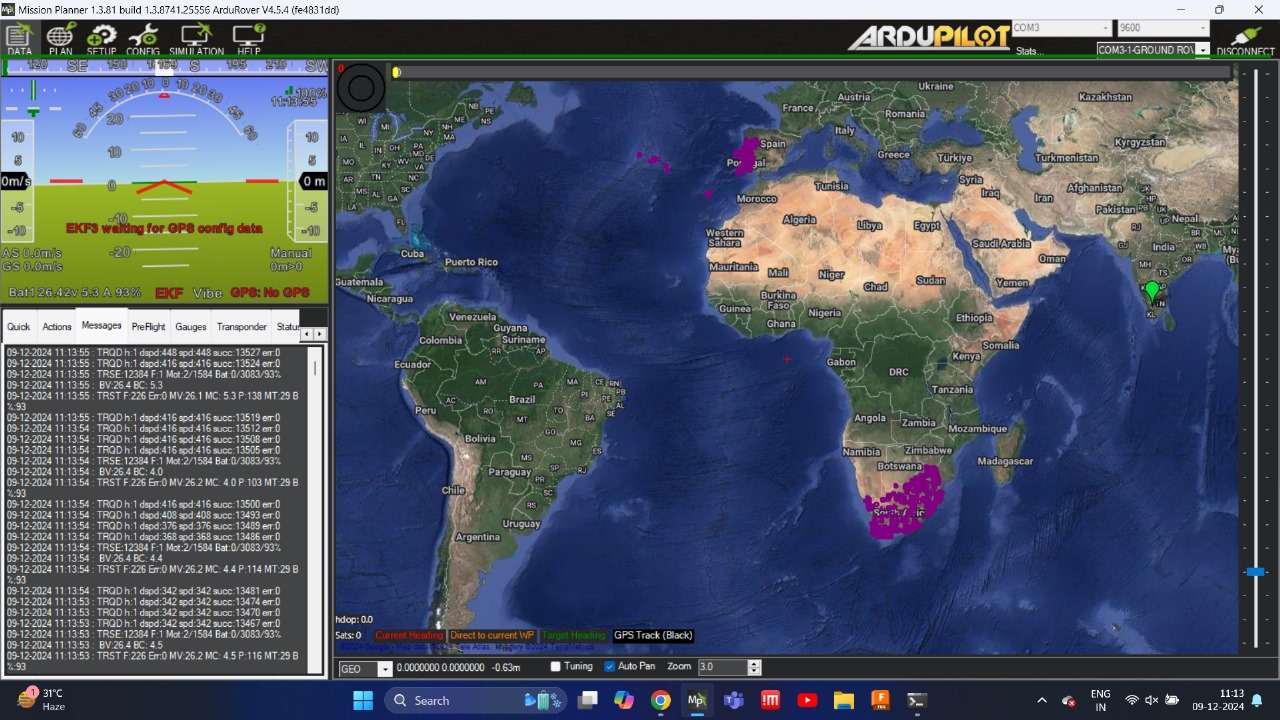
Hi @rmackay9 ,We are using torqeedo motor as our primary motor and we use Japan drone’s torqeedo interface board .In parameter we use TRQD TYPE = Tiller but we cannot receive rpm messages from TRSE msgs ,attached param and screen shot of messages.
I guess the good news is that it appears you’ve got the communication working well between the autopilot and the Cruise motor. The “err:0” debug message that’s printed is certainly good. I guess you’re able to control the motor as well?
I see your comment above from April that it wasn’t working completely.
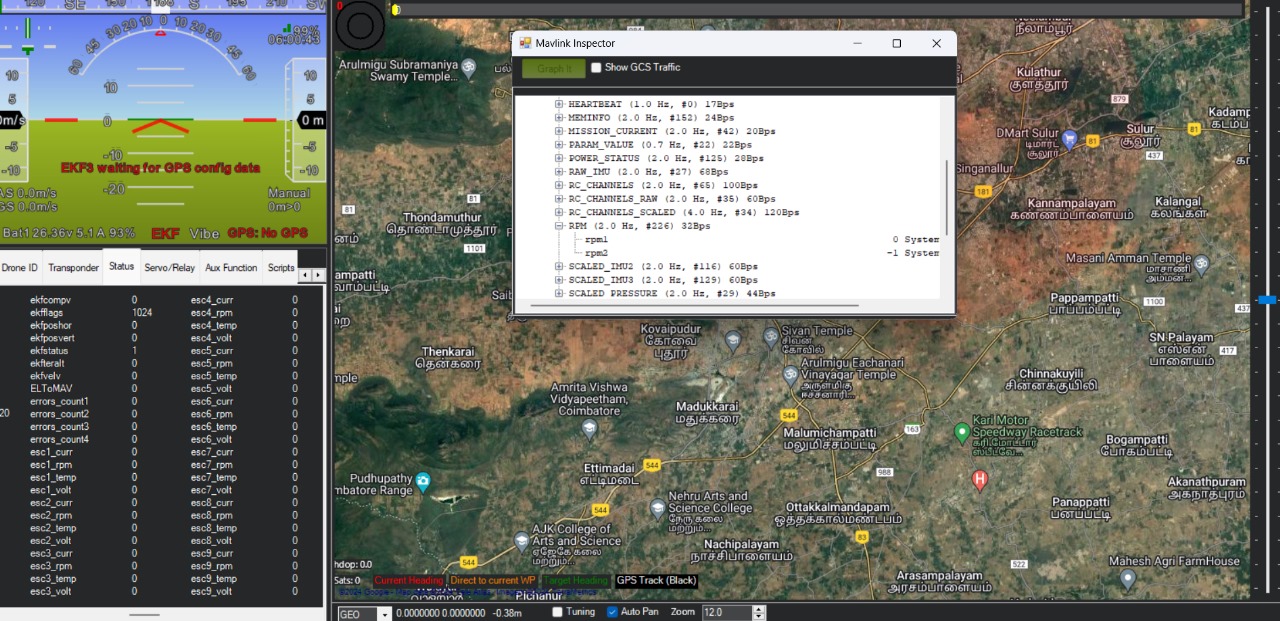
In any case, when using the Tiller setup (e.g. TRQD_TYPE = 1) then the motor’s RPM should appear in the TRST log message. It looks like we don’t report this in the TRST debug message which appears in MP’s messages tab. I think the RPM should appear in the ESC telemetry mavlink messages which can be viewed in MP’s status tab and using the mavlink inspector.
Yes @rmackay9 we are able to control our torqeedo motor well but
Still we didn’t get rpm in both esc telemetry nd in mavlink inspector.Do we need to enable any parameter for it?
Again, sorry for the delay in replying. From the screen shots above it looks like the “TRST” debug message is not being printed which means that the SYSTEM_STATE message is not being received by the autopilot. Because other messages are being received I think it is most likely that the Cruise motor is not sending it. Perhaps Torqeedo has slightly modified the protocol for the Cruise? It’s hard to say and since my contact at Torqeedo left, it’s difficult to get information from them
After some thought I think that a Lua script is actually the better solution in the short term. The reason is that we have a number of other NMEA 2K drivers (which is what TorqLink is I believe) and they are all written in Lua so leveraging this existing development is much easier.
In a couple of cases we’ve later come back and promoted Lua scripts to run in C++ so that’s still a possibility.
In any case, could someone test out this early version of the script? It is just a slightly prettier version of Nubbish’s script but I would like to confirm it works before taking the next step which includes consuming more data from the motors
How to install:
Use an autopilot with an H7 processor
Set SCR_ENABLE = 1 and reboot the autopilot
Connect the Torqeedo motor(s) to the autopilot’s CAN ports. If only one motor is used it should be connected to CAN1. If two motors are used, connect the left motor to CAN1 and the right motor to CAN2
Enable CAN1:
CAN_P1_DRIVER = 1 (First driver)
CAN_D1_PROTOCOL = 10 (Scripting)
Enable CAN2 (if a 2nd motor is connected):
CAN_P2_DRIVER = 2 (Second driver)
CAN_D2_PROTOCOL = 12 (Scripting2)
Download the script by clicking on this link and then push the “Raw” button near the top right
Copy this script to the autopilot’s SD card in the APM/scripts directory
Restart the autopilot
Confirm the script is running by checking MP’s Messages tab for, “torqeedo-torqlink script loaded”. Alternatively look for new parameters called TRQL_ENABLE and TRQL_DEBUG
Set TRQL_DEBUG = 1 and report back any messages on the MP Message’s tab
If you’re feeling brave, arm the vehicle and raise the throttle
Of course this script is very new so please be careful! I think the script is safe but I don’t have hardware to test it so it is conceivable that there is a bug. Please be prepared for anything including the motors suddenly spinning at a very high speed
Hi @rmackay9 we are working with torqeedo cruise 3.0 6hp for past 1 year with japandrones rs485- ttl board it was working fine till last week suddenly torqeedo health is 0 not showing anything, how to figure out if there is any problem in janpan drone board, we’ve checked all wiring was fine but i do no what may be the problem.
Good to hear that it’s been working. I guess the issue could be either the motor or the adapter board so the best method would probably be to test the adapter board on another torqeedo motor and/or test the motor with another adapter board.
Sorry, I can’t immediately think of a way to test if the serial to RS485 converter chip is working or not. I guess a very rough test would be to using a voltage meter with a short detection feature and see if some of the pins have become shorted. This only detects one kind of failure though so it’s not really complete.
@rmackay9 we don’t have another adapter board or torqeedo engine ,we have checked the motor with torqeedo throttle its working fine , and adapter we’ve checked with multimeter one end with on/of and other with Aor B its showing 2.65v and when placed in vcc and A or B its showing 5v amd when i placed with vcc and gnd no voltage is shown, is that right way? And adapter board last time itself after import its cost around 172 dollar in india , so is there any possibility of fabricating the board here itself, sorry for asking this if there is any possibility of sharing the board design or else we reorder from japandrones itself.
I’m afraid we can’t really share the design of the board beyond what’s already on the AP wiki here. A fair bit of work went into the design and testing of the board (not to mention the ArduPilot Torqeedo driver development itself which is free for all) and from Japan Drones point of view, we’re selling them for under $75 USD so it’s already quite reasonably priced I think.