I would like this to be autonomous. A true hybrid of plane/copter automatic landings, rather than a hard switch over.
Greg both your aircraft are tilt rotors and don’t really operate much in between Plane and copter. The Quadplane on the other hand has the ability to be both at the same time, so a hard transition isn’t needed. This is where Q_ASSIST comes in.
Until there is an autonomous solution that is identified or created, I will experiment with the timing of switch modes. Maybe I should try Q_LAND mode and keep the pitch stick forward to force forward penetration into the wind. If Q_VFWD works in this mode it should reduce the load on the copter motors.
BTW, I’m planning to only have about 1 minute of useful VTOL battery power onboard, so these optimizations can make a big difference.
Interesting, I did not realize the mixed mode capability with Q_VFWD_GAIN and Q_ASSIST_SPEED. The Quadplane functionality is certainly different than my tiltrotor or tiltwing models.
You may find that these parameters are not needed if the quadcopter power system is sufficiently strong. I would still start without using them as a baseline and then see if adding them in slowly improves performance. It should be a fun experiment!
I am planning for the exact same type of landing and takeoff maneuvers using a quadplane. For my specific app I only want to be able to VTOL over obstacles and then always fly in forward flight otherwise. Accordingly, the quad propulsion setup is minuscule in comparison. (180g of quad for 2kg aircraft). I’ve mentioned this on DIYD before but I’d also like to eventually see is a combination move like high alpha climbouts and steep forward motor reverse thrust approaches with ground proximity flare into quad. I’m pretty excited about the possibilities with quadplanes/tiltrotors!
Hello Jeff,
Thanks for joining the thread. The Q_community is still quite small so it’s good to keep the conversation alive.
I’m still struggling with trying to get SITL working, good to see you’ve had success with it. I feel like there must be some good techniques even with the existing code to perform the high efficiency VTOL maneuvers we are seeking.
180g quad lifting a 2KG airplane is impressive. I’d love to learn more about your project.
Thanks Iskess for the warm welcome. Happy to be here!
I agree the quadplane community is still small, but hopefully we can have some rigorous discussions here on how to optimize their use and capabilities! Until now it’s been hard to find like minded and capable co-developors, so maybe we can team up to keep the ball rolling. I’m a part of the PerthUAV team who are going to the UAV Outback Challenge in September this year. We are using a Talon derived airframe converted to a quadplane using 5g ESC’s and tiny 35g 2206 motors for the h-quad setup…we still have over 4kg of thrust on 6x4.5 props however! It’s a fairly efficient setup using around 5-6A at 20m/s cruise in forward flight so running two 5.2Ah batteries will get you a fair distance.
I have a few ideas still chasing around in my head that I’d like to explore to improve on this further, in particular I’m keen on getting rid of as many “bits” on a quadplane as possible…things like wings (high stall speed flying body would be better) at least two motors (so a differential, thrust vectoring tricopter with asymmetric mono-prop main rotor) along with a bunch of electronics etc. Ultimately I’d like to have a fold-up portable wing under 1.5kg that can take a 500g payload and cruises at around 30-40m/s for about 2 hours on electric only, and that can VTOL of course!
A part of that is to replicate bird flying dynamics for landing and takeoff; so a lot of effort for a short period to VTOL, but then easy sailing once in the air. I also prefer speed over endurance to achieve the best range and coverage in the shortest amount of time, as this results in the most effective imaging/surveying/SAR capability.
BTW if you need a hand to get SITL for quadplane running just let me know, maybe we can start a new thread for that. Alternatively I have a working Raspberry Pi image that you can download, which should run out of the box if you have a Pi to put it in. It’s well worth it for mission planning and testing, because you don’t have to worry at all about crashing some bits and bytes…
I think the QuadPlane is less efficient than a tiltrotor but is easier to build. As for the mention that tiltrotors have “hard” transitions, I haven’t seen it. The FireFLY6 with AvA has the smoothest automated transitions I have seen.
I have a large field down the street from my house with a metal fence and without clear access so I cannot fly a normal plane without a take-off or landing strip. The FireFLY6 gets around this issue with its VTOL capability. We matted down an area and had some nice flights last weekend. I used Stabilize mode for take-off to clear the brush and get out of harms way quickly. Check out the transitions from hover to forward flight and back. The video is in 4K if you download it from Vimeo.
Greg,
When I said “hard switchover” I wasnt referring to how smooth the transition was. I meant that tilt rotors are less adept at manuvering halfway between Plane and copter than a Quadplane. I’m sure it can be done to some extent, but as you know while the Firefly6 is in transition it has limited maneuverability and once you activate the transition it continues through the process until complete. The front rotors need to share their thrust vector in the forward and horizontal, which creates some limitations when “in between”.
The quadplane has some advantages that it gains as a benefit of the lower efficency of the extra rotor. It can utilize the lift of its wings to fly below normal stall speed. With a normal plane, the AOA must be increased as speed drops to maintain lift, this increases induced drag and eventually a stall results. With quad plane the AOA can remain mostly constant (level pitch) and the quad motors can compensate for the loss of lift. I don’t think the current code takes full advantage of the possibilities yet.
Simply amazing that you get 4KG thrust out of those little motors. This causes me to rethink possibilities. 6 of this little motors in a Y6 config could lift a 4KG airplane. I really like the idea of having such small props to drag around in forward flight.
I’m very intrigued by your design plan, but my needs differ a bit. I need to fly slow for mapping, so I need to keep my big wings.
Thanks for the offer to help with SITL. Maybe I’ll order a RasPi to dedicate to this. I’ll fiddle a bit more before I reach out for help so I don’t embarrass myself too much.
Is there a particular reason why you want slower speeds for imaging? In our experience we get better results when the aircraft is above 20 m/s provided your camera can keep up with the faster shutter times(generally better for sharper photos) and the prevailing lighting conditions. We found that a “wobbly” plane attitude negatively impacts the images more than a high speed lateral movement ie fast forward flight. It’s actually one of the reasons why I want to go faster and have less exposed wing.
Also for mapping, if you are operating LOS, it’s nearly always better to have a faster velocity to cover more distance in a shorter time, which in turn means the imaging/mapping job gets done faster. From memory about 60min at 24m/s covers the whole LOS area (up to 1.5km from pilot). After that it’s time to move to the next survey point and repeat.
Anyways at the moment I’m looking for a good way to model my 2kg design to digitally optimize it as much as possible before doing a build. Any input welcome.
I’m going for high resolution imagery, like 1 cm. we need to identify leaf structures of invasive plant species here in Hawaii. Due to terrain my flight lines are sometimes downwind and the camera can’t keep up. The fastest camera I’ve found at a reasonable size and weight is the Sony a5100 at about 700ms/shot. Also, the flight lines are tight, and the turn radius is a factor, especially when flying around steep terrain.
Ok that makes sense, it’s not a typical application (yet!). I’m wondering if you wouldn’t be better served using 4K video instead and grabbing 8MP images out of that, possibly using some zoom if mounted on a gimbal to get you more altitude. The a5100 carries a fair bit of glass, which might be a bit redundant if you want to keep your airframe light and durable. A stabilized lighter camera might yield better overall results and performance. Are you only doing point tests, or do you need full coverage to determine exact species infiltration? What sort of areas do you need to cover in a day?
In the part of the country I’m in, the biggest “hill” we have to overcome is the local beach sand dunes!
For hilly terrain and high res. a quadplane is probably the best fit as they allow you to VTOL from anywhere and quickly get to difficult terrain and provides a level of flight performance redundancy, by allowing you to hover in tight situations etc. Are you using LIDAR and the terrain following functions in Arduplane? Or aren’t they up to spec?
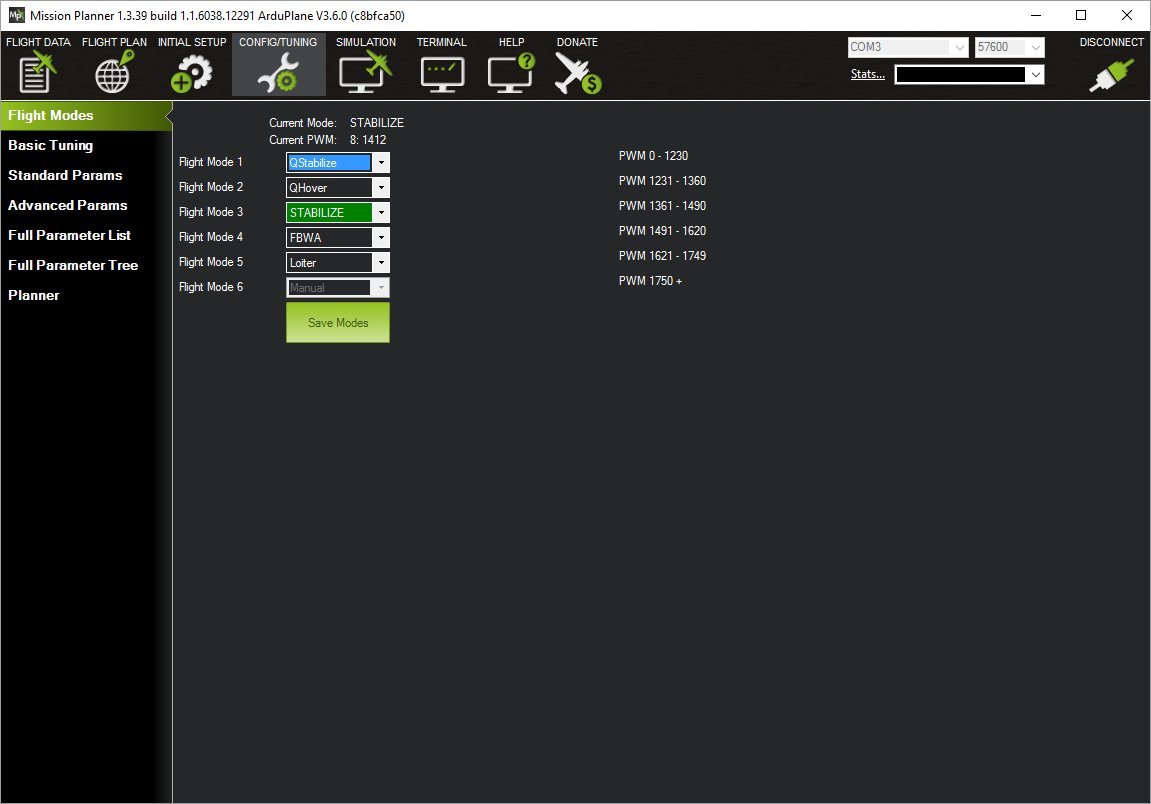
With my new found QuadPlane experience, I did some more testing with the CL-84 and discovered a workaround for the sputtering motor issue. Below is my current setup for Flight Modes on the CL-84. Note that I have also changed RC_SPEED to 300 but it didn’t change the motor issue.
When disarmed and in STABILIZE mode, I can arm and the motor function is normal.
When armed in either QStabilize or QHover modes the motors are normal but if you change to STABILIZE mode, causing a transition, the main motors sputter. Sounds like popping in the ESCs. When in this condition, if you change to Manual mode, the motors then work fine again. When returning to STABILIZE from Manual mode, no motor issue.
When arming in Manual or STABILIZE modes, and transitioning to QStabilize mode, no motor issue.
When arming in QStabilize mode, and transitioning to Manual mode, no motor issue.
So the culprit seems to happen when armed and you transition from a Q mode to STABILIZE mode. I did not try transitioning from a Q mode to FBWA mode. Hope this helps…
Hi Greg
What ESC’s are you using? I’ve had issues with BLHeli/SimonK if not RC_SPEED is not run at a exact multiple of the ESC max PWM. I found 250 or 500 works for 500Hz ESCs and 300 for 600Hz ESCS. For whatever reason arduplane now defaults to 490, previously 300.
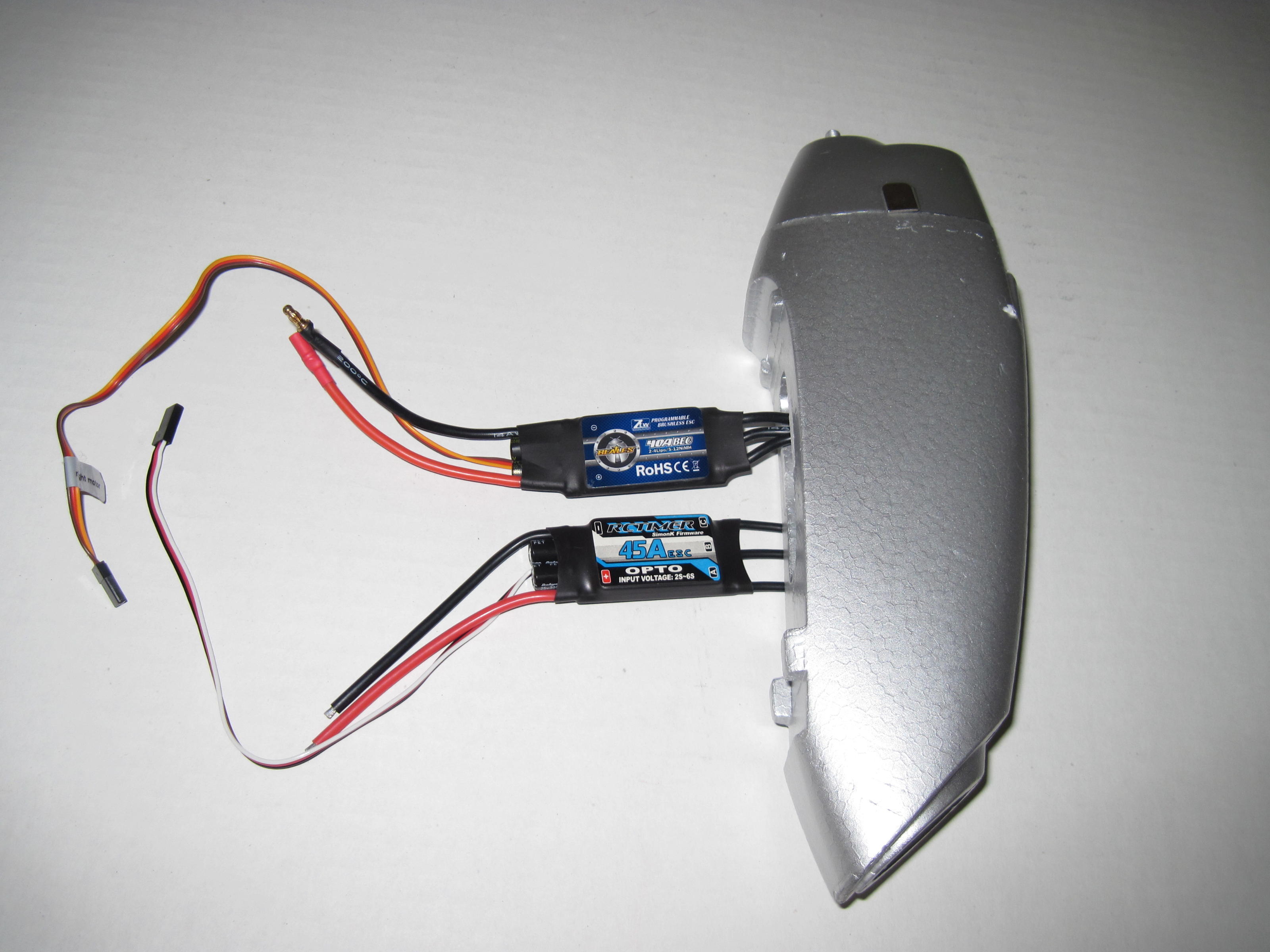
I upgraded the stock CL-84 ESCs to RC Timer Opto ESCs with faster SimonK firmware. The main two ESCs were 45A and the tail ESC was 30A. All three were overkill in size so little to no cooling is required. The 4s Lipo voltage makes the current draw small. These ESCs have worked great on many Pixhawk projects.
Note that I had no motor sputtering issues when using Copter v3.3.3 firmware. There are a couple of videos up near the top of this thread labeled, “CL84 with APM Copter Test 1 and 2”. Also, the issue goes away when changing to Manual mode and then back to STABILIZE mode which suggests a software issue.
I may test fly it this weekend and make use of the Manual mode workaround. I haven’t heard from Tridge lately so maybe he has his CL-84 set up for testing now too.
Hi Greg
We suffered for a few weeks trying to sort out the ESC issues, in particular with BLHeli and switching between firmware versions. Hopefully you have better luck.
In regards to Tridge not being around much, I’d expect he’s pretty busy getting ready for the challenge just like we are!
Yeah, I have my own list of ESCs that worked with Arduflyer v2.5.2 but not with Pixhawk. The RC Timer Opto ESCs have been tested good on many Pixhawk projects.
From my point of view in the states, you and Tridge are neighbors!
hi all,
we are starting to build vtol plane and testing firmware on pixhawk
my plane have 4 motors , both front tiltable
i install actual arduplane 3.6 fw from mission planner
and setup
Q_FRAME_CLASS,0 - quaid frame
Q_FRAME_TYPE,1 - x motors setup
Q_TILT_MASK,5 --my plane have 1 and 3 front motors tiltable 00000101B = 5
RC10_FUNCTION,41 --tilt servo at aux 2
RC10_MAX,1850
RC10_MIN,1050
problems
-i have no any signal at aux2 output
-tiltable motors do not start in plane stabilize or manual mode (only turns in qstabilize)
-vertical motors do not start if arming requeried disabled
what firmware version is actual for tiltrotors?
Thank you!