@Jaspreet_Dhanjal,
Welcome!
That frame should work without any code changes if you fly master (ie. “latest” from a GCS like MissionPlanner)
If you tell me the exact motor and servo ordering I can suggest a config
Make sure that front-right motor is clockwise when viewed from above. It is a common mistake to make it anti-clockwise in this type of aircraft. It won’t fly if you do.
Cheers, Tridge
@tridge
Mr @GregCovey suggested me this… is it possible?
GregCovey
Wow, what an interesting mechanism you have for the tiltrotor! I think the 8 Main Outputs could be enough. We’ll see what Tridge says and if it needs modeling in SITL before using an existing frame class.
The servo mapping could be:
- SERVO1: aileron
- SERVO2: elevator
- SERVO3: rudder
- SERVO4: front right motor
- SERVO5: front left motor
- SERVO6: rear right motor
- SERVO7: rear left motor
- SERVO8: main wing tilt mechanism
and the layout is same quad X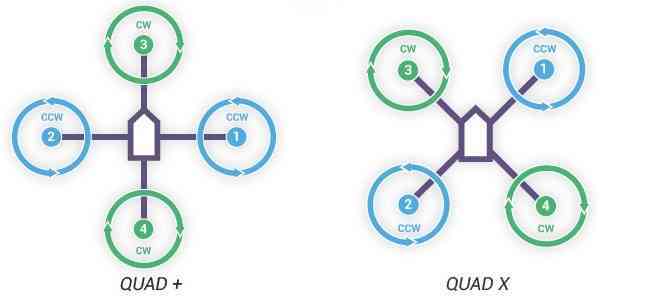
1 Like
I think so, yes, but you will need to use H frame, not X. You will need to make front-right motor clockwise. If front right motor is counter-clockwise with a tiltrotor then you get roll feedback and the aircraft will be unstable. Think of it this way:
- imagine the motors are tilted forward at 30 degrees
- now imagine the plane is rolled right at 45 degrees, but wants to be level
- so the quad controller will want to put more power in the right motors to try to bring it level
- the front right motors torque will now be partly correcting yaw, but will also partly be inducing roll
- the roll from the motors torque will push the vehicle to roll right more
- the more power you add to the right motors, the more it will try to roll right
In other words, the motor torque will be fighting the stabilisation, not helping it. If front right motor is clockwise then it will be helping instead of fighting it. Then you can be stable. The same applies to all 4 motors.
H frame is better to all VTOLs?.
I have a flying wing one in it’s first stage 
it depends on the frame. It’s just a particular issue for tiltrotors that use motor torque for yaw control.
1 Like
thank’s Tridge; I’m going to post photos when install the quad.
*installed ap v3.8.0 beta3
*set BRD_TYPE 5
*set Q_FRAME_CLASS 0
*set Q_FRAME_TYPE 3
- SERVO1: aileron (value 4)
- SERVO2: elevator (value 19)
- SERVO3: main wing tilt mechanism (value 41)
- SERVO4: rudder (value 21)
- SERVO5: front right motor (value 33)
- SERVO6: front left motor (value 34)
- SERVO7: rear right motor (value 35)
- SERVO8: rear left motor (value 36)
is this correct? i made changes in the parameters of servo_functions)
Scared to test this setup (might burn the esc)
im using
40a esc 5v/0.5 linear input freq 1khz firmware blheli (pwm signal supports 1000us-2100us
and im getting bad AHRS (resolved by keeping the model steady for 45+sec)
Hi Tridge,
The link to the hopefully intact logfile: https://www.magentacloud.de/share/rf81u3z5q5#$/
On the left servo linkage a locknut was loose. Thank you for your good observation.On this flight we had also problems with the plug of the main battery. We suspect too much resistance and therefore the loss of performance when hovering at the beginning. Before the next flight we will solder new plugs.
Best regards Rolf
This morning we had our third flight. Both transitions have worked great.
Log: https://www.magentacloud.de/share/e.2saescpx
The PIDs still have to be corrected.
https://vimeo.com/211097038
rolf
2 Likes
Hi,
what type of servo (standard or retract) do you use and how strong is it ? I would like to try a tiltrotor with a Tmotor MN4006 and a 15" prop and I am trying to get an idea what I need as servo. Any suggestions welcome.
we use this D-Power CDS-360BB MG Servos for the fronttiltmechanismus and the yaw-tilt also.
Hi Rolf,
Thank you very much for the info. Your servo is rated 60-70Ncm, I don’t know the size of your prop, do you think a 100Ncm servo will be good enough for the 15" prop ?
12" props. The motor (DYS BE2814 700KV) weighs 105 grams.
Hi Rolf
Can you please share your parameter files
thanks 
looking good! congratulations!
Yesterday we had successfully adjusted the PIDs of the pitch axis.
A little more authority around the YAW axis, we will still adjust.
With the new 40/80 C 4700 4s battery was finally enough power in hover.
So the transitions were both great.
Regards Rolf
2 Likes
The transitions look great, Rolf!
Have you detailed your tilt mechanism anywhere?
that is looking pretty smooth now. Awesome!
Hello,
I am the partner of Rolf at the project VTOL.
The tilt construction is made of PA (3D print)
This design has the disadvantage that at the end points (+/- 45 degrees)
only 70% of the torque of the servo are available. In addition, the precision of the push rod is only moderate. The accuracy of the transmission of our servos is also not very good. Therefore, there are motions of the motor. But in works so well enough.
A better solution would be the position of the servo directly on the axis of the holder for the motor. And a more precise (expensive) servo.
pictures of the design: red = variant
Regards Walter