Rolf
April 19, 2017, 3:47pm
277
tridge:
… but you will need to use H frame, not X. You will need to make front-right motor clockwise. If front right motor is counter-clockwise with a tiltrotor then you get roll feedback and the aircraft will be unstable. Think of it this way:
imagine the motors are tilted forward at 30 degrees
now imagine the plane is rolled right at 45 degrees, but wants to be level
so the quad controller will want to put more power in the right motors to try to bring it level
the front right motors torque will now be partly correcting yaw, but will also partly be inducing roll
the roll from the motors torque will push the vehicle to roll right more
the more power you add to the right motors, the more it will try to roll right
In other words, the motor torque will be fighting the stabilisation, not helping it. If front right motor is clockwise then it will be helping instead of fighting it. Then you can be stable. The same applies to all 4 motors.
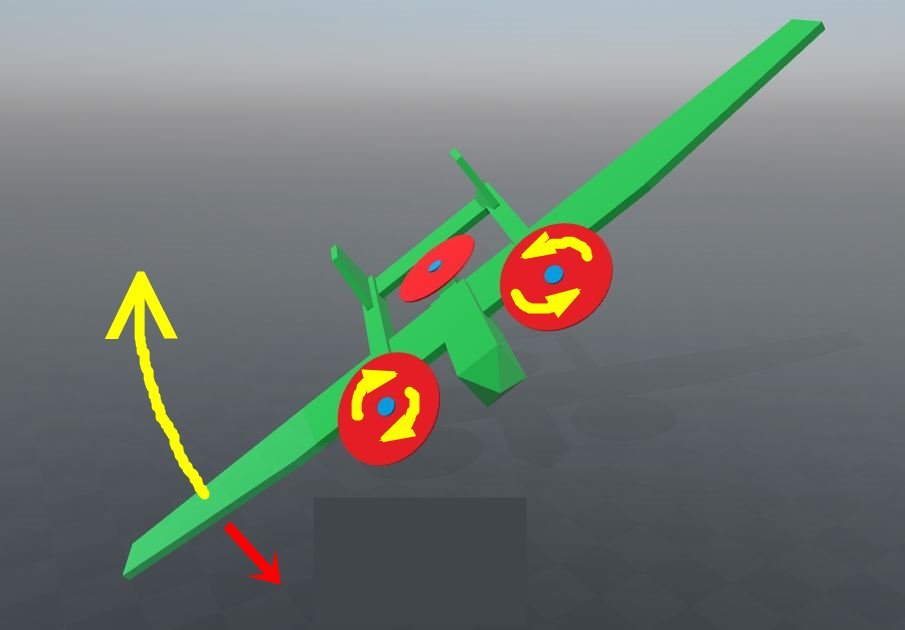
@Tridge
Increasing power on front right motor leads to roll-feedback in direction of the red arrow - the wrong way round ? In this case we have to change the front motor direction
Regards Rolf