Randy : you are correct the wheels don’t move as they should
Motor c turns mower right & test d both motors go forward.
Doug, the Dataflash logs have a .bin extension. I do not know why your length would be 0 and an not sure how to troubleshoot. @rmackay9 (Randy) will be able to help, I bet.
Thanks Kenny: I was able to find it by deleting every file and starting over with a new run and then only had 1 BIN file so I was able to save it.But I cant upload or attach a file that big. Do they have a FTP server or how is a user to upload their BIN file to this forum. Dropbox? googleDrive? and a link to it?
Sorry for all the “apparently” simple questions.
Doug
I use Dropbox for anything big for this discussion group. Share it in Dropbox and put the link in your message. You can click the 4th icon over in the message editor (chain) to insert a hyperlink.
Thanks Kenny:
Here is my LOG if anyone can help
https://drive.google.com/open?id=15-STLhSHcjCIyHK6AJwHqBG7H-NqhW3X
Doug, I am very unskilled in interpreting the logs which are very extensive. Hopefully someone like @rmackay9 will be able to help.
I should probably not even try, so as not to embarrass myself but… I did poke around and one thing I noticed that your desired steering rate does not move very much at all. This graph shows the desired steering turn rate in red and the actual in green:
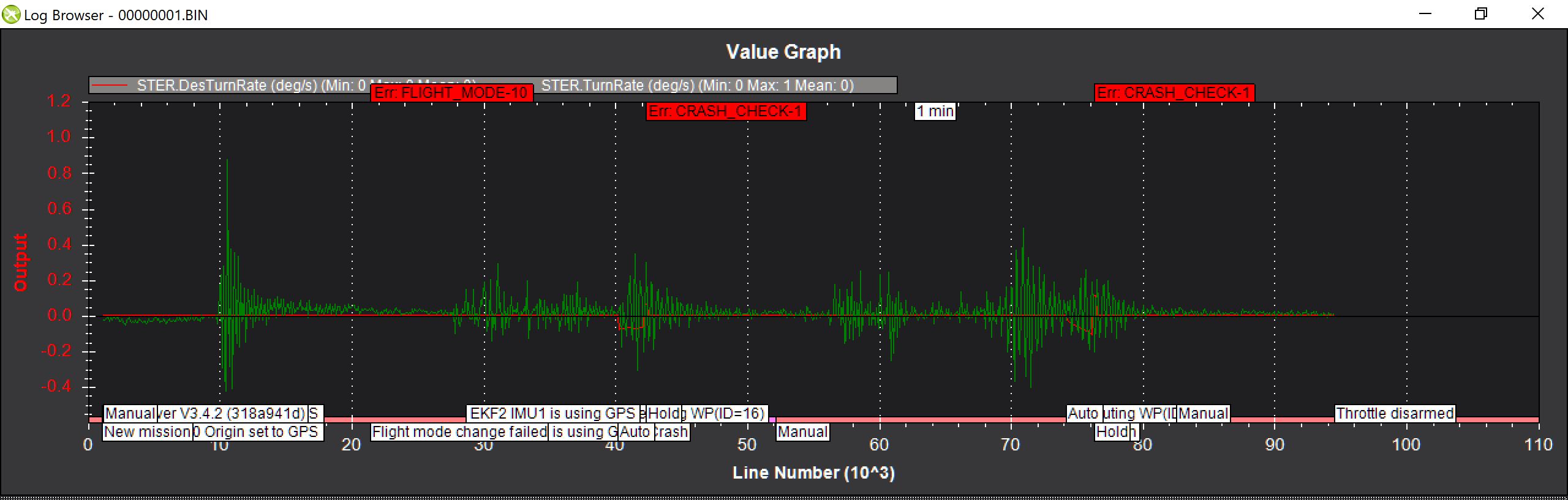
Notice that the red only deviates from 0 by about +/- 0.1. I thought the green was oscillating wildly but then when I saw the scale was so small, perhaps that is not much.
Her is a log from my mower. Notice that my desired turn rate goes to +/- 20 and my actual somewhat tracks that. I probably have as much oscillation at a low amplitude as you do. The scale is just very different:
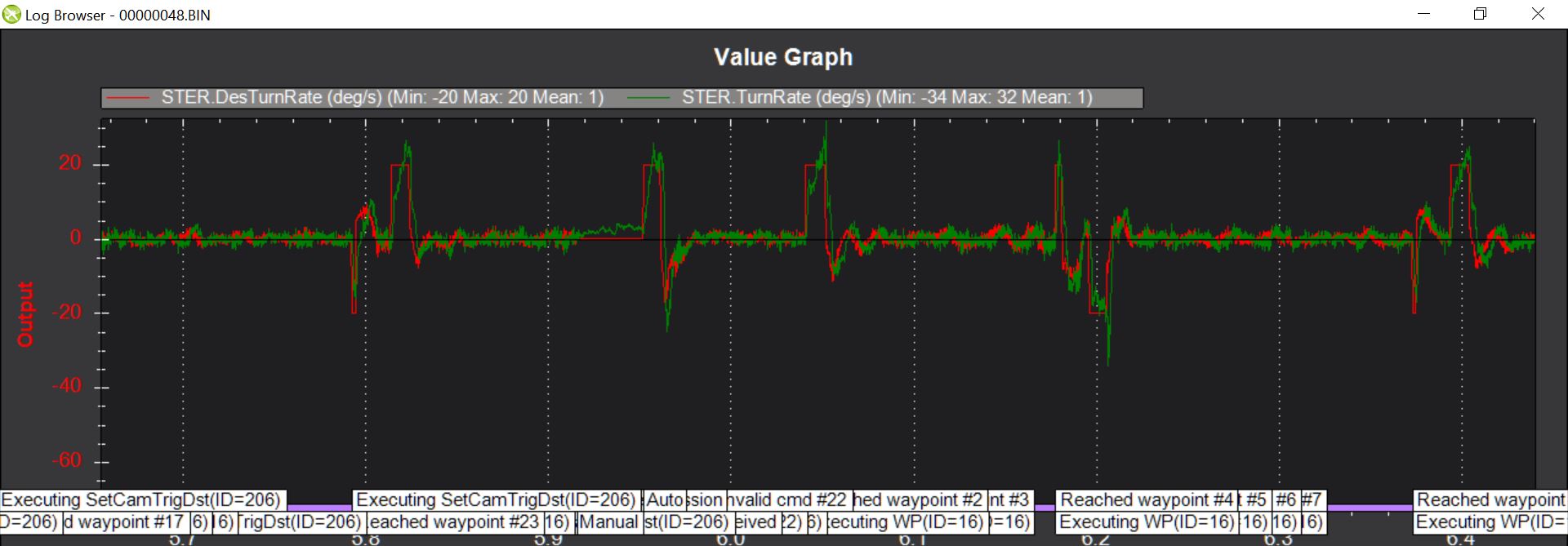
It looks like my max turn rate is capped at 20 and yours is capped at 0.1. I can’t find a parameter that directly sets that.
I am not sure this is directly related to your problem as it appears your rover is not turning very aggressively from the logs but that is obviously not the case from your description.
Hopefully, better help will arrive soon!! 
I think we discussed in another chat but it seems the MP’s motor test screen is showing that the wheels aren’t moving as they should then there’s no way it’s going to move correctly in any mode. So really that’s the key thing to fix. I’ll hold off on doing any log analysis until this config/ESC issue is sorted…
Randy: I don’t understand why the mower runs fine in manual mode if it is the sabertooth and motors. Thanks for all your input.
Doug
Kenny; I have tried all I know to rectify this issue. If you are using left stick for throttle and right stick for steering ,How do you reverse?
I have tried the "skid Steer’ as I understand Ardupilot’s definition and my single right stick operation might be what is causing my problem.
I want to try your approach to skid or “differential” steering as I like to call it.
Thanks
Doug
Well success at last , I figured out the problem. My interpretation of Skid Steer varies greatly… So I went back to basics and found the problem. Now motors are running as they should with only right stick. chan1 and 2 .
left and right differential steering (ZTR)on ch1
forward and reverse throttle on ch2…
Thanks to those who helped, Kenny, Randy & others
This really is POWERFUL STUFF!
Doug
2 Likes
Great news, Doug. My steering is set up exactly like yours except channel 3 is the throttle which is the left stick up and down. The right stick left and right is the steering. My PILOT_STEER_TYPE is set to 0 (default). I guess it is “skid steer output” but not “skid steering input”, refering to the description of PILOT_STEER_TYPE.
Record us some YouTube, please!!! I love seeing others’ projects.
1 Like
Kenny : here is a quick shot of testing a random way point track I set up.
2 Likes
That is awesome. Your tuning looks great. It seems to be tracking very straight, much better than mine. And your pivot turns look really good. Mine overshoot a good bit. Your entire machine is just more snappy. You ought to be ready to cut some grass!
1 Like