So I can reproduce my issue with the servos many times. What happens is this. If i’m outside and it gets a good GPS lock the whole system works as it should. I’f I’m in the house bench testing, every time the servos will lock up at extremes when it appears to lose GPS lock. I have to unplug the servos, wait for the GPS to lock on again and when I plus them back in everything is fine until it loses lock again and sends the swash to an extrteme angle, the safety light starts flashing and I lose control of the swash.
I still have a radio link as I can flip the flight mode switch and it changes modes even when the servos are not functioning.
Basically: Indoors- GPS signal loss makes me lose control of the servos
Outdoors with good GPS signal, everything works great.
Obviously this is an issue, in flight if I lost GPS for whatever reason the heli would commit suicide in a hurry.
TIm
Tim, just to make sure i understand, it is doing this in Stabilize flight mode? No GPS locks up the servos after a fashion? In Stabilize? It seems to me that Pixhawk2.1 uses the v2 build, correct? Which is the same build the regular Pixhawk uses.
Chris,
100% in stabilize mode, radio on and booted properly, receiver on and ready. Ive tried to narrow it down with no luck, ill make a video as i said a few commebts ago to Rob
Tim.
Ill also try to get a log and parameter file up if that helps? Ive read through the files, but nothing obvious jumps out at me and in a newbie anyways so theres that.
It should be noted that if the Here GPS is not attached and instead the safety switch is plugges in, this behavior does no happen. In that case it will not arm though as there is no GPS signal and thats part of the arming check. The safety switch will stay lit though and not start blinking like it does with the Here GPS switch indoors.
Outside though, the Here works 100%.
Tim
Bill,
Its not possible that the v1 build would even work on my board right? Ive just done a little reading, and although i do not fully comprehend the differences i see the basic reasons for v1 & v2.
Tim
Tim,
I don’t think it’s possible to load the wrong firmware using mission planner’s released or beta versions. I think it is smart enough to know which board it is flashing to and chooses the appropriate file.
Alright, ao i have some more clues. Keep in mind the Pixhawk is in “stabilize” mode. I boot the pixhawk up while on the bench, today im getting good signal indoors so it locks on and i have normal control and the led on the Here is solid as i have it set to be on all the time vs having to push the button.
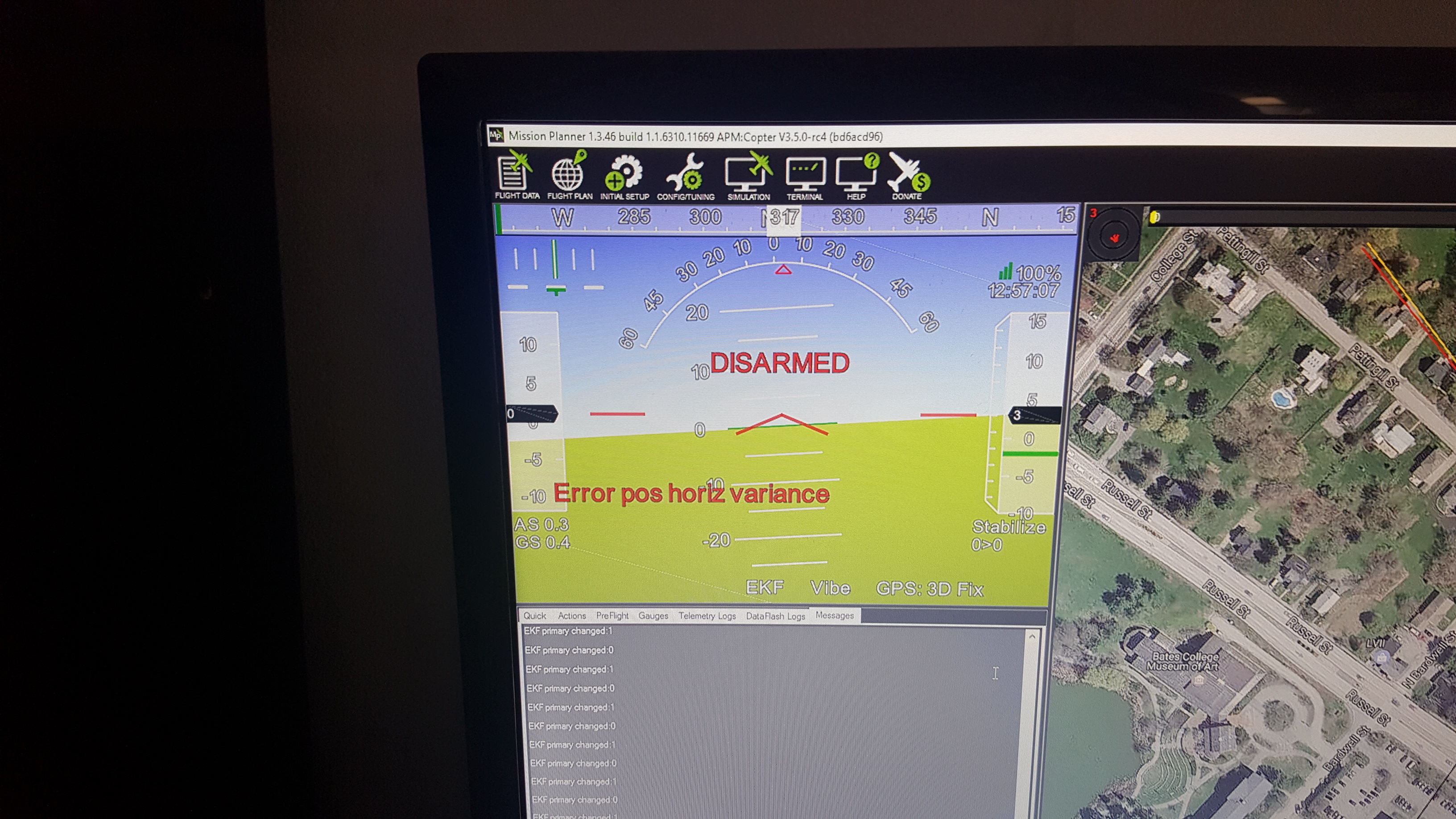
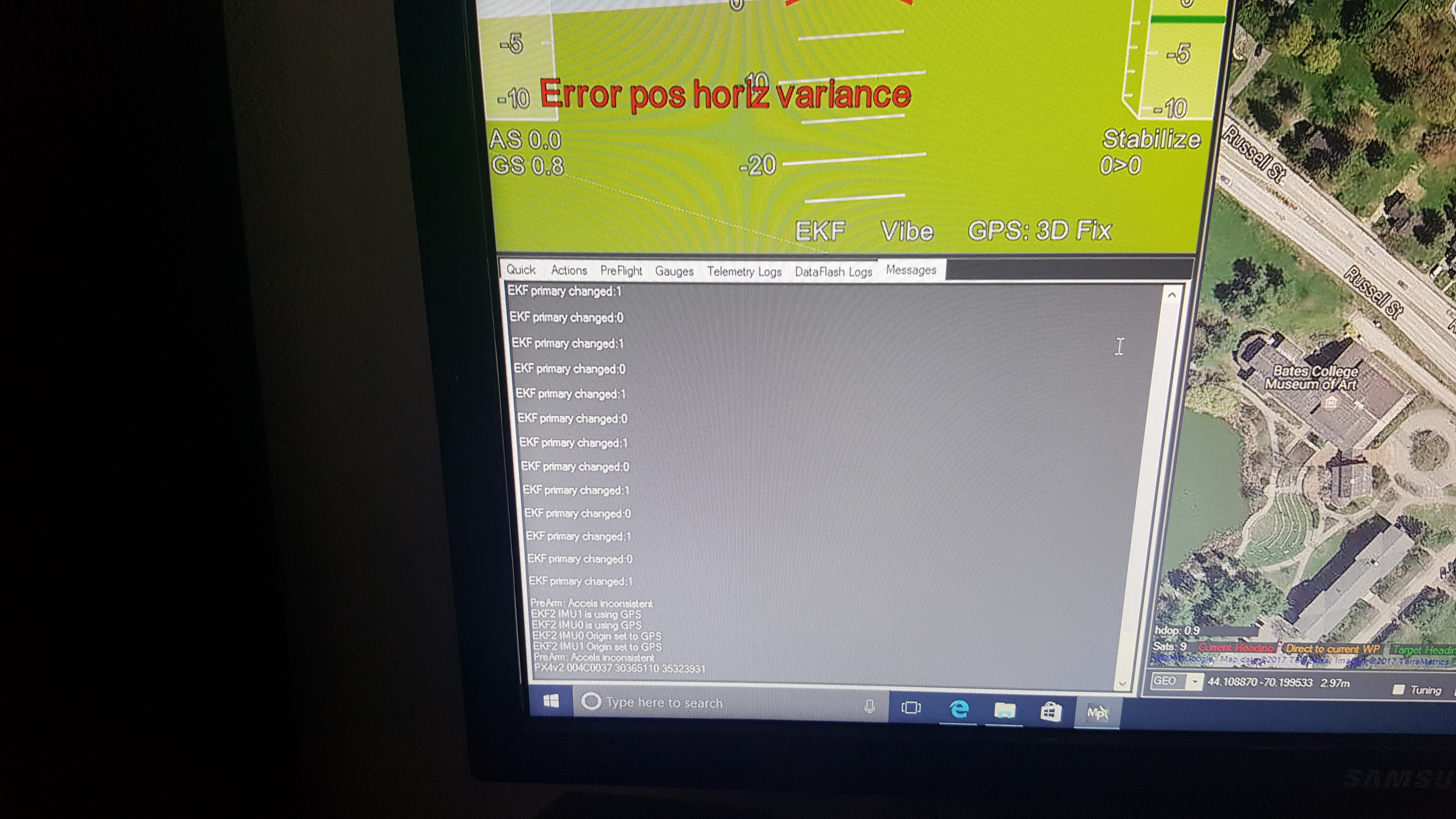
Anyways, i close the shades in my french doors to my deck off the office, which are the internal metal blinds, “good at blocking GPS signal”, i get a slew of errors and lose control of the servos, the swash locks up and the led on the Here is blinking.
I unplug the servos to avoid damage, open the blinds and wait till it locks on the GPS again and the light goes solid red and when i plug the servos back in eveeything is working normally.
This is somehow definatly tied to the GPS whether im in stabilize mode or not, and when ot loses signal, or gets weak, i get alot of EKF primary changed to either 1 or 0 errors and the servos have a quick blip when ot changes.
Tim, I only know this did not happen for me with a regular Pixhawk and a uBlox M8N with 3.5. That was a couple RC’s ago so it’s possible something happened from then to now in the code. But I have a sneaking suspicion it has more to do with this specific hardware you are using and I do not know what to do about that other than what Rob suggested - see if you can get Randy’s attention. Or possibly ask the manufacturer, which I think is on the forum as proficnc, about what the expected behavior is with that.
I can’t believe they would require a GPS lock to fly - that would be getting too much like “DJI - Safe To Fly” stuff for my comfort.
Chris,
That is exactly what I’m going to do, get a download of my parameter file and a .bin file attached with a video demonstrating my issue. Then I will try to get in touch with proficnc, Randy or Tridge and see what their opinion is.
Tim
Chris,
Another thing while I’m thinking about it, is it normal for the EKF to change from zero to one and Back Again when the GPS signal is weaker? My concern is the fact that the servos stutter when it does this and obviously that may not be good in flight?
Tim
I think they call that EKF Lane Switching and it’s not good when it happens. This is what happens with a EKF blowup on takeoff - it switched IMU’s, and then watch the heli twitch a couple more times on the ground and try to tip over when it switched twice again before I shut it down.
My issue was caused by “aliasing” of the IMU’s and they didn’t agree. So it either blows up the EKF or switches lanes, and when it switches it may acquire a new attitude all of a sudden. Even though my vibes were good on the vibe monitor I had high frequency vibes affecting the controller and I had to go to a different mount and isolation to fix it.
I do not know what is causing it for sure on the bench - it may be GPS signal loss. Unfortunately I don’t know a lot about how the EKF works. But Randy knows more about that.
Chris,
I appreciate the video, very telling on how thorough I am going to have to be before that big ole girl of mine spools up and takes flight. There are far more contributing factors like GPS, EKF, multiple accels and gyros and lines upon lines of parameters to sift through, check, learn about and adjust to get a good flying machine I’m seeing. This will all be a learning experience, hopefully its not my usual “learning from my mistakes” type though.
The EKF most certainly has me worried, not necessarily because I think its going to fail, but because I know so little about it and how it effects flight.
I’ll definitely have to look into it switching from 0-1 all the time though.
Tim
Yeah, I wish I knew more about that EKF2. As far as I know, it should not be “lane switching” on the bench with the IMU’s calibrated. Unless repeated acquiring and dropping of the GPS signal causes it. I don’t know.
Personally, I still fly AC3.3.3 in my mapping heli because I don’t have any problems with it in 200 hours. I test flew 3.4 in it once and had the EKF blow up (velocity variance) in high speed flight. With flybar, no biggie because Acro is straight-thru manual control. With FBL it’s not. And besides, I’ve never had the EKF blow up in 3.3.3. Get a “EKF variance” once in awhile that just goes away. When EKF2 blows up you lose the total attitude solution in the Pixhawk.
So I play with all this newer, more fragile fancy stuff to see how it works. But for dependability that has to work, I still fly 3.3.3.
Chris,
Conceptually speaking, if i wanted to run 3.3, i would want an origional pixhawk correct? Not a v2, or in my case a 2.1? I just thinking in the background here. I do have that good deal opportunity on a flybarred trex 700 out there, and original Pixhawk’s can be had cheap.
All that aside, i “will” get this 800 off the ground with a Pixhawk 2.1, i hate starting anything and not seeing it through. Im just getting the feeling its going to be a process.
Tim
I’m sitting here with my heli on the bench, hooked up to the Mission Planner and as I watch the telemetry screen i’m noticing that the degrees of yaw keeps increasing even though the heli is sitting still? That seems odd to me?
Tim
I remember at some point in this thread or elsewhere someone said if you are on the bench and hold say right aileron for a long time the swash will eventually flip in the other direction, something to do with the error or the like?
Well, i was playing around with my heli in stabilize mode on the bench and i held the swash hard in every direction for at least 30 seconds and every time i let go of the sticks it snapped right back to level, not unlike a regular fbl would?
Im running heli, 3.5 rc4.
Tim