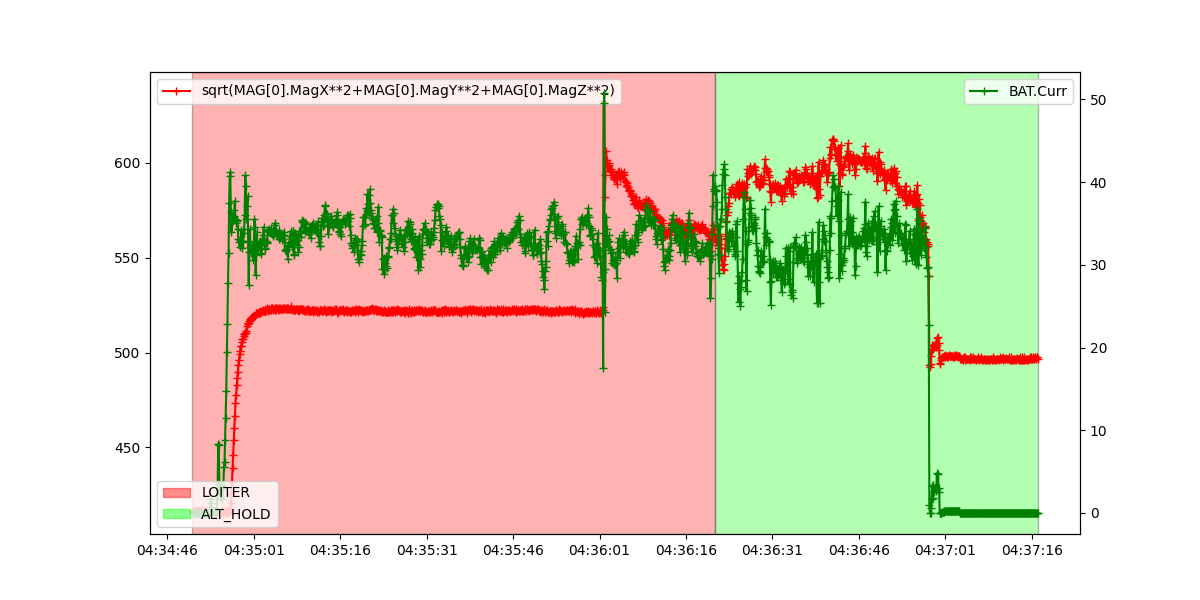
No surprise but there’s a pretty big current spike that I’m guessing is the moment you switched power supplies. Before then the compass is pretty happy, but after that you can the compass performance is poor. To me this suggests that either the compass has issue with the transition from tether to battery, or there is an issue with the battery connections to the system.
I agree with @UAVSkies comment above that given you have two drones that should be the same (and one is working) then you should also consider that there is a mechanical fault with this one. By that I mean something like a bad filter capacitor, poor solder joint, poor ground, etc.
Leonard did a great write-up on grounding issues. There might be a nugget in here that will help you.