Nope. They don’t. They got plastic case ones. Just talked with Alec at RMRC a couple days ago. They got the description wrong on their website.
Oops Alec told me five days ago that they did haha so I’ll have to wait and see what arrives.
Are there any published results of Control Zero vibe numbers online yet? Been poking around. Very interested in the BMI088 performance!
I haven’t seen any personally. Maybe @pkocmoud would know? It’s been the easiest to tune FC I’ve experienced. I’ve mostly used cubes in the past.
You’ve flown it? It is new enough that not many people have used it yet. About to order one myself to try out.
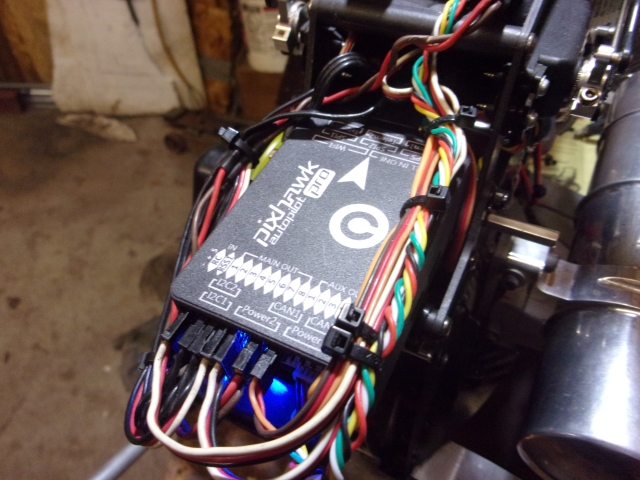
I was working on this helicopter that has a PH3 Pro on it. The control is mounted to the tray with a 2" wide strip of velcro under it, directly above the engine’s cylinder. Vibration is perfectly acceptable, it never clips the IMU’s, the helicopter handles with FBL-unit precision.
So this is not a scientifically done experiment, or using any standardized test method. Just an observation. Since I had the cowling off it and the controller is exposed I stuck two 1oz flat lead wheel weights to the top of it and test flew it. It did not handle properly at all.
I pulled the log and looked at it and with the weights on it it had excessively high vibration in the X-axis. And it had a steady clipping of both IMU’s. Same phenomenon as the “Cube”-style controller - touch those weights with the engine idling at 4,450 rpm and it feels like getting a shock in the tip of your finger from the high-frequency vibration.
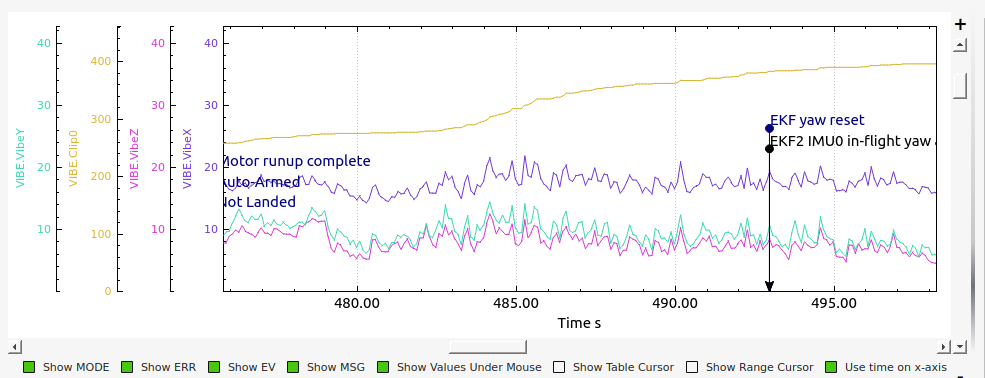
Peel those weights off and that “tingling” in the case of the controller is gone. Y is slightly higher than x and z. And no more clipping.
I’ve seen the recommendation given to stick tire weights to it to add mass to the control and reduce the vibes and clipping. I’d like to point out it doesn’t necessarily work that way. It CAN if it damps certain frequencies that are causing a problem. But it can make it worse too.
The engine in this helicopter runs at 11,450 rpm at governed speed. 380Hz vibration from the acceleration of the piston and resultant acceleration of the crankcase as the piston reverses direction twice per revolution. The power stroke is more prominent than the compression stroke so it amounts to a fundamental of 190 with a second harmonic at 380. It’s that second harmonic that kills the IMU’s in my experience. Anything mounted above the control that can couple with that at its natural frequency will amplify it. Since the primary accelerations from the crankcase are fore and aft (cylinder faces ahead), the x-axis is what kills it with those weights on there and causes the IMU’s to clip. The controller by itself without any added mass (in the wrong place) does a perfect job of damping that with the internal damping mechanism in the controller - as long as it is mounted with a relatively solid mount. If I put any sort of soft mount under it, foamy blocks or whatever, it is back to the same problem as putting the weights on it - it will clip the IMU’s.
1 Like
Yes we are using them on both our 13" quad and our 10" quad. Dare I say it’s my favorite flight controller to date? Super small but very powerful. mRo also has excellent customer service. Beats the heck out of Cube support 
Chris, thanks so much for the real world testing. As you say, the vibration levels look good and the internal isolation must be handling those frequencies perfectly. I haven’t had any experience with gas helis; can I ask if you’ve done an FFT on that particular heli? Are the vibes due to the engine much greater than the vibes at rotor frequency and 2*rotor frequency (I’m guessing they are?)
Looking forward to recieving the 3 Pro to do some testing.
Cheers
Jason
No, have not done any FFT on any heli’s. And yes, the engine is the primary source of vibration, both from mechanical vibration and noise. The rotor vibration frequencies are not detectable. Bill had me try some experimental software some time back that was supposed to detect the rotor rpm using the vibration. It did not work.
However, the rotors have been balanced and tracked on my helicopters using a RPX DynaTrack with the strobe. So it’s not going to be able to detect anything at that frequency because it doesn’t exist.
I had to snap this photo to show something interesting. This is a piston 800-class machine with a V3x in it

That silver material over the flight control - what is it? It is a foil-backed thin foam insulation material that comes from those accordion things that you can fold out to put in the windshield of your car to keep the sun out. My wife wondered what happened to hers. I told her I noticed it was old and I need it and she needs a new one. She said it she just got it two weeks ago. Ooops.
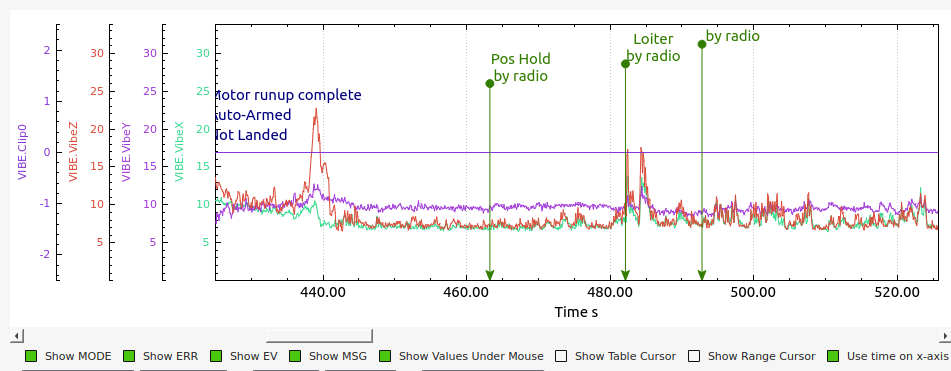
But that stuff is handy. With that stuff over the control vs not being there it reduces the vibration by about 25%. Vibes in all three axes run 4-6 on this heli.
Since it is impossible for it to do anything for mechanical vibration I attribute the reduction in vibration to a reduction in noise with that thing over the controller. You can see where the outlet of the muffler is and that’s probably about 120-130 dB right at the exhaust tip.
1 Like
Interesting that you weren’t even able to pick up rotor frequencies, I would’ve thought maybe even with great balance and tracking you’d be able to find traces of say rotor wash impacts on the fuselage/tail boom.
Also, great ingenuity with the foam insulation, very impressive you’re able to get such low vibes on a gas heli.
When Bill had me try that custom firmware build it would pick it up during runup, but then it lost it. The rotor was balanced and tracked at 1,530 rpm.
Those survey helicopters have had considerable work done to the engines for doing camera work. It’s not in the flight control or mount. They are 2mm stroker engines. Just like the rotor, they have some vibration during runup. But once they reach the speed they were designed to run at they are as smooth as a turbine.
1 Like
My guess is that it shields the unit from the mass of fast moving air coming from the rotor. That air could induce vibrations, expecially if it hits cables and make them vibrate, the pretty long you have in the back of the unit i mean.
Just a guess.
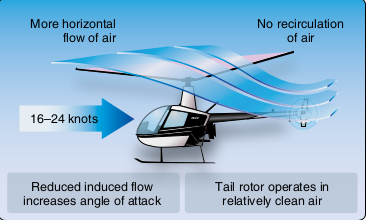
It is certainly possible. However, the downwash velocity is not all that high at that location in hover. In forward flight it could be. The inflow to the main rotor in forward flight is from the front, then downwards and back underneath the rotor. It flows directly over the tail rotor, which increases the tail rotor efficiency in forward flight.
This occurs at the translational lift speed of 16-24 KIAS in all helicopters when the nose comes up all by itself and they start to fly like a fixed-wing instead of using brute power to move air mass equal to the weight of the machine. It is called “blowback” by helicopter pilots but the aerodynamic reason for it is much more complex.
I have noted the reduction in the measured vibration with that cover on there at all air speeds and flight profiles.
1 Like
Turns out I did end up receiving the plastic version of the Pixhawk 3 Pro so I sent it back without unboxing or testing. Then I noticed that on the Drotek website they have announced the end of life cycle for the 3 Pro. However, Paul at Drotek did let me know that they are working on a flight controller based on the fmuv5 hardware spec, with a similar form factor, damping etc to the 3 Pro so I’ll keep an eye out for that. They don’t expect to release until 2021 though…
Dropix is EOL. The Pixhawk 3 Pro is a different unit. It has been around for at least three years so I’m sure it will eventually be discontinued. But before it is I’ll buy their remaining stock so I got a supply of decent controllers ![]()
I did a similar test with the car audio. I put the flight controller on the film of the audio and pasted it with double-sided tape. However, I found that the stickiness and location of the double-sided tape would seriously affect the consistency of the test. USB or other external devices generally do not lead to the consistency of test results.
You’re right- the mounting can have an impact on the amount of vibration imparted on to the flight controller with this setup. In order to make sure that the conditions are as close to identical between the tests, we would need to mount them all to the same plate at the same time.
I decided to run the tests again, but this time I mounted 2 flight controllers at a time to the speaker and compared the two (see pic). I bonded the flight controllers together to ensure there was no relative motion between them, so I think this is as close as possible I will be able to get to a direct comparison between flight controllers.

The tests I did were: Pixhack V3 vs. Pixhack V5+; Pixhack V3 vs. CubeBlack; Pixhack V3 vs CubeOrange. I compared all to the Pixhack V3 because a) it’s the best at removing low frequency vibrations and b) it was the easiest to mount to.
These are the results of those tests:
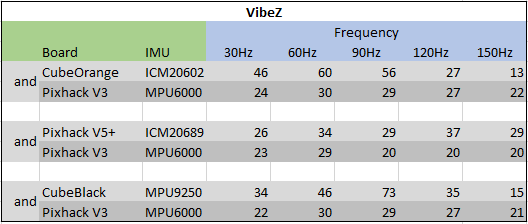
These results are largely in line with the original results I gathered and the experiences people have had with these flight controllers. As expected, the Pixhack V3 is again the clear winner. The Pixhack V5+ isn’t too bad either. The CubeBlack has a bad resonance at ~90Hz and the CubeOrange has a bad resonance somewhere between 60Hz and 90Hz. It’s worth noting that at higher frequencies the Cubes do much better.
1 Like
I wonder if it would make much difference on the Cubes (any others that have it) to use the header extension USB with thin wires to the carrier rather than the direct USB with the chunky cable.
Good point Peter, I’ll check that when I get a chance.