Based on the size and weight of the boat combined with the propulsion system I don’t know if you can make it much better. You may want to try a few of the waypoint runs and slowly change the NAVL1_PERIOD from 8 to 10 then to 12,14,16 and see if this improves things. The I should probably be back up to .3 based on what I have read. I don’t use differential steering much but use ackerman steering so this is hard for me to advise. So try raising the NAVL1_PERIOD a few times and see if that helps.
1 Like
thanks David, I will try and update you about this then. Happy new year! 
Any luck? just wondering. Happy New Year!
Hi David,
My laptop got wet during the experiment due to the rain on that day. But after it takes a few days, just got it work!
I tried to tune the NAVL1_PERIOD=14 and it seems the performance is the best. However, when I try to increase the I slowly(from 0 to 0.1 to 0.3 etc), the performance get worse. So I just adjust it back to 0 agian. Here attached the performance: where the NAVL1_PERIOD=14, and steering_rate_I = 0
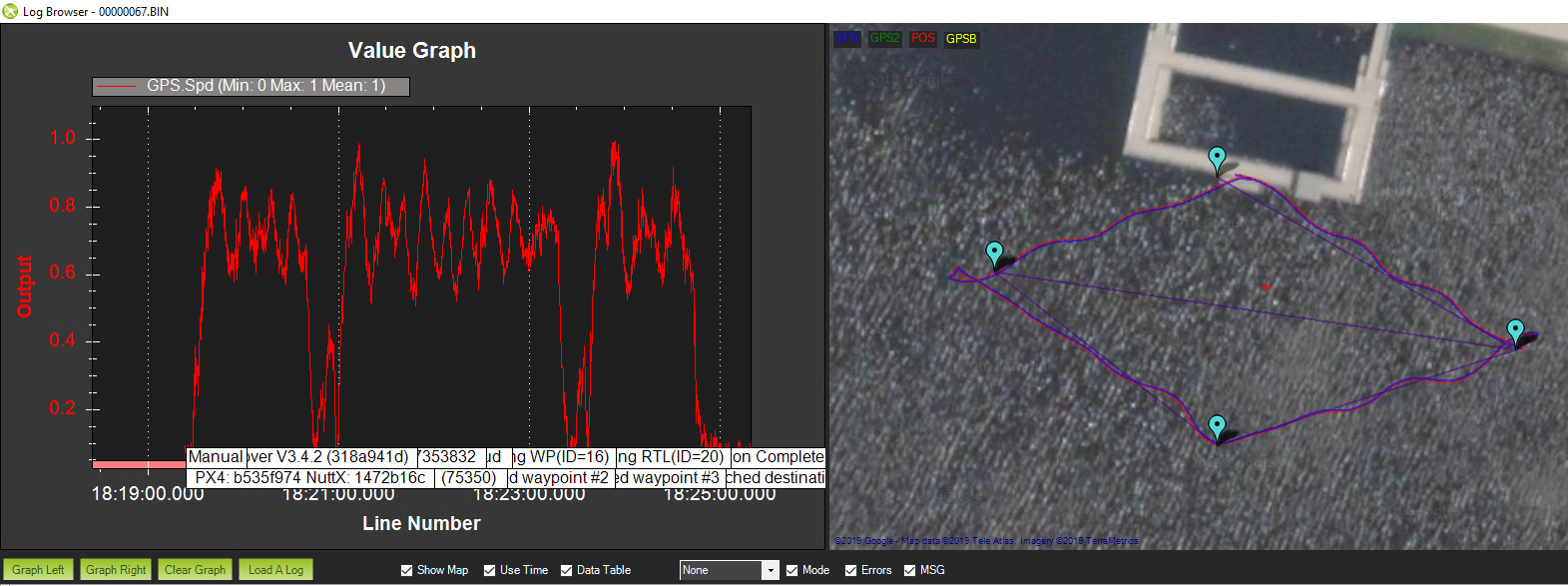
Here I attached the log, where you can see three rounds of running. For the first round I = 0, the second round I = 0.3, the third round, I = 0 again. We can see I = 0 has a relatively good performance. Do you think so?
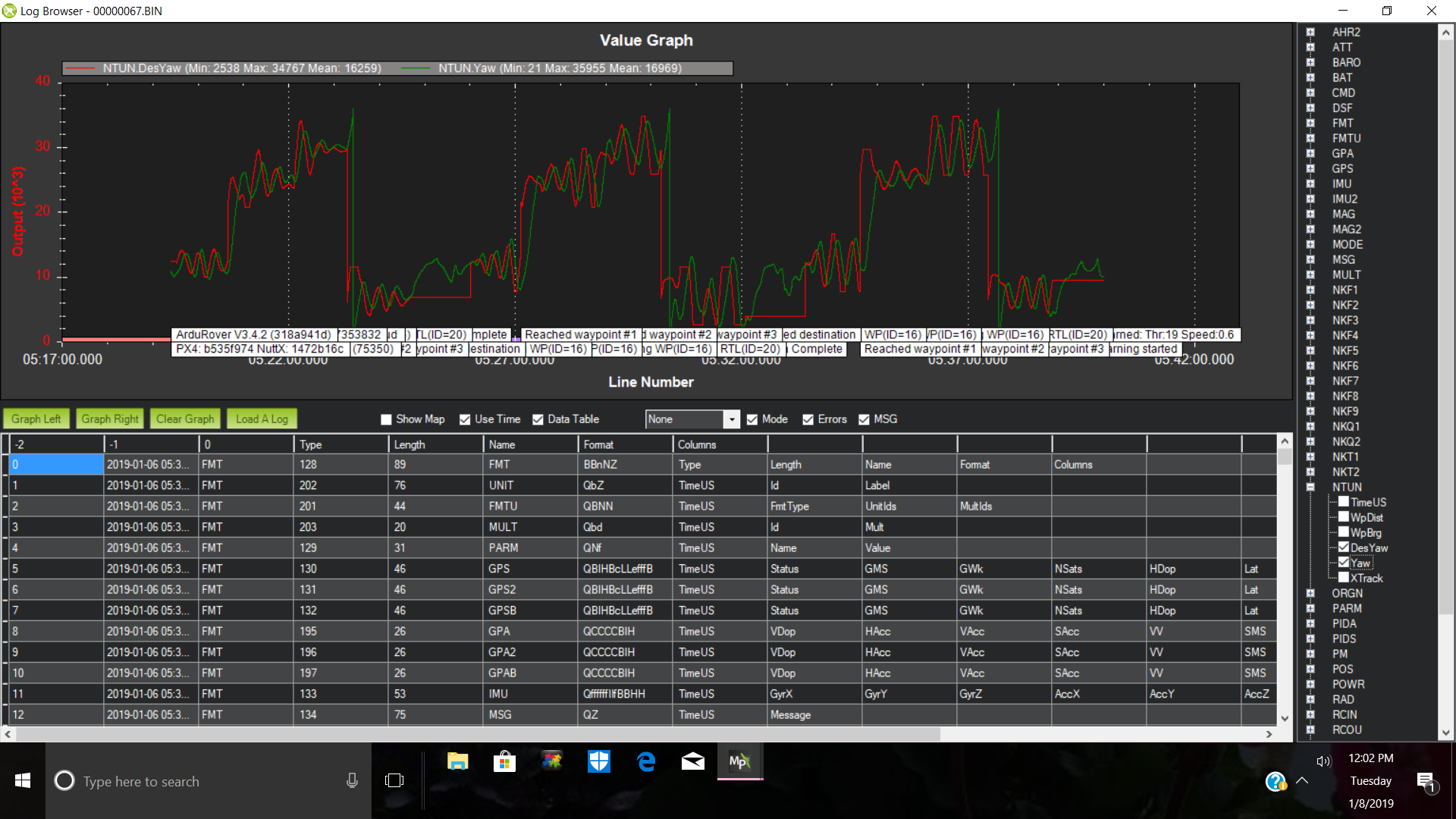
I think I would put the I at .3. NAVL1_PERIOD at 14 is probably a good number. You may want to now adjust NAVL1_DAMPING. I think it defaults at .75. Try .8 or .7. Your Des yaw and yaw are getting better.
However your desired turn rate vs actual turn rates still looks ugly on a graph.
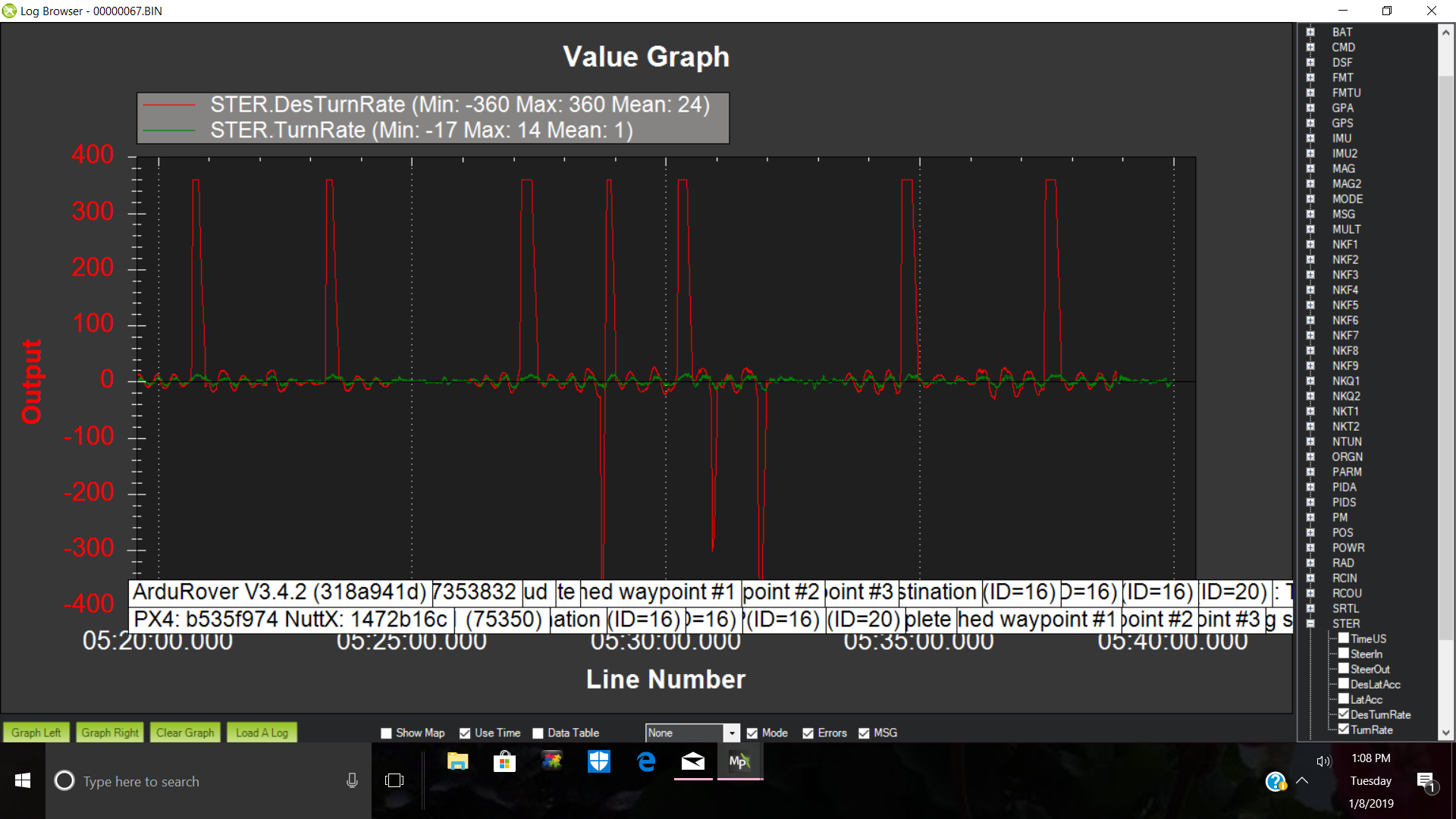
Due to how slow your boat turns I would try changing the following parameters and see how it goes.
PIVOT_TURN_RATE 12
ACRO_TURN_RATE 10
The reason I think this is when your boat makes a pivot turn it never rotates more than 12 degrees or so a second.
3 Likes
thanks to all,It’s very useful to me. I will set parameters in my boat.
1 Like
hellow, l’m doing the same thing as you chen. but when i tune the pid and change to the acro mode. the ship move automaticly, when it in mannul mode it performs normally. (are you chinese ? i am a chinese student , may i have your qq or wechat or email?), thanks you very much .
vx1437974052 中国…
Hi, Yu Chen, I encountered the same problem as you(the pidachieved can never reach the piddesired). I don’t know if you have solved it here. Can you please guide me?
it’s too slow ,the angle is not the matter