I see now what is happening. You simulate within MP: that downloads some code and executes it from MP. Frankly, I had never tried that, but I have done that in Windows and happens as you say and as on your video.
I use SITL in Ubuntu or Mac (documentation), git cloning from https://github.com/ArduPilot/ardupilot.git copter code, compiling for SITL and executing it (sym_vehicle.py, although it calls other programs, calling finally the compiled code). Doing so I have always observed the waypoints mess and renumbering (I don’t know if I am missing something).
Real life is ARM code. Since I had observed the waypoints mess in SITL before trying the DO_JUMP’s in real life, from the beginning I have always inserted the dummy jump point, which does no harm and is a workaround for compiled SITL. I’ll try shortly a real life mission without the dummy jump point.
My main computer is a mac and has been for years. I’ve started dabbling in Ubuntu (on an older iMac) and Raspbian OS. I’m going to read up on the link you provided because it pains me to go back to the PC laptop to use SITL now that I have Mission Planner running on the linux machines.
I ran SITL on Mojave (many 32bits apps, so can’t upgrade). During a month or so I was getting a compilation error on SITL, which I thought because of a lacking feature on the command line tools for new versions, so I was using a git cloned march version.
Surprisingly, I have tried today (may 1) again, and it compiles. However the problems remain. Here is the video.
Coclusions:
Mission correct in MP simulation in Windows.
Problems compiled SITL in both Ubuntu (SITL)/Windows (MP) and Mac, unless I miss something.
BTW1: for copter simulation, the compiled SITL is ardupilot/build/sitl/bin/arducopter.
BTW2: much more speech in MP than in GQC, which is very important in the field. Thanks, Michael.
Ohhh sorry, I didn’t know that you were a teacher. @Allister Is there any way I could pm you? There is a file needs to be loaded to complete this mission.
You’re polygons look super detailed. The polygon locations aren’t waypoints, they’re just markers to work with. The polygon can become an area to fly in (fence), an area to stay out of (exclusion), or an area to focus on (survey).
At this point I would create a home point near the polygon area you’re working with. Don’t worry if it’s exact, once you’re on site and connected to the drone it will correct that. Just start with a home point nearby. Right Click >> Set Home Here.
Next create a takeoff waypoint. (Or let survey create a takeoff point for you, depends what you’re doing)
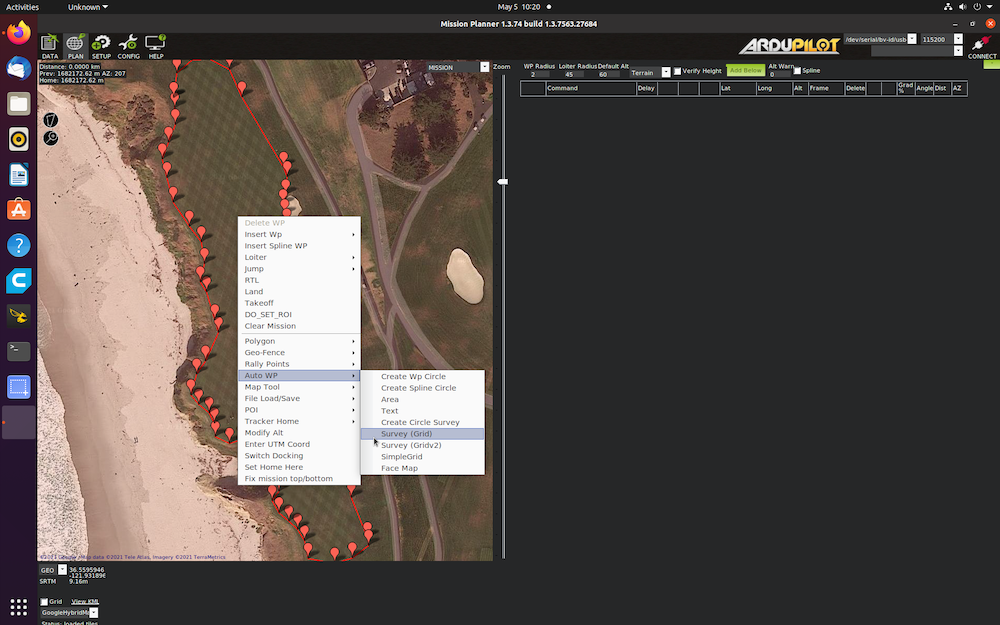
I’m guessing you want to do a survey of that area because you created a polygon? If that’s the case right click on the map view >> AutoWP >> Survey (Grid). Then you can set up all your mission.
Yeah, I have already set my home near the polygons. Would you be able to open the mission instructions docs? Requirements have been give in that docs. @Allister
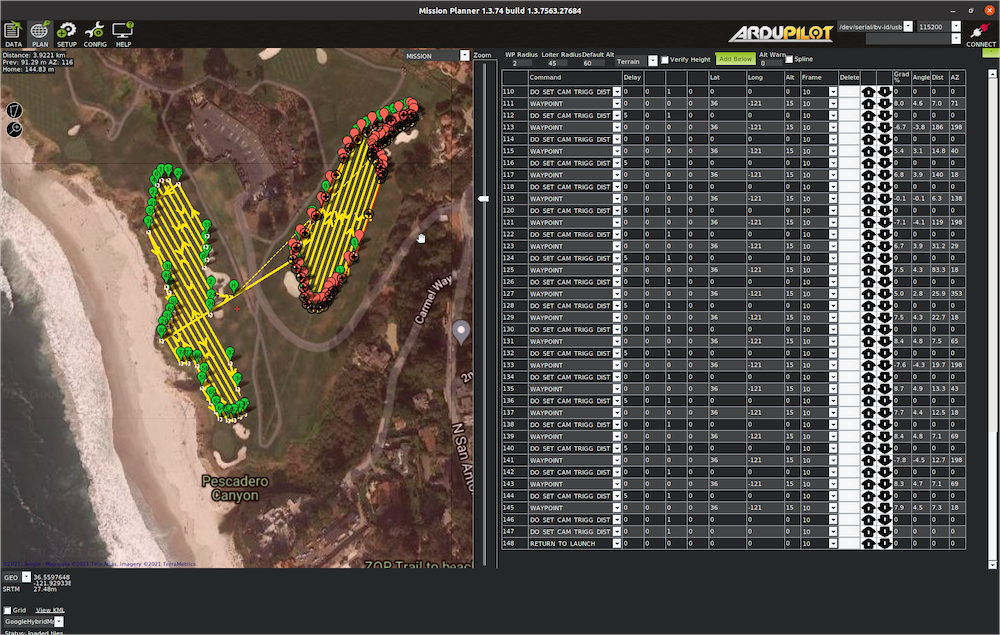
So the next thing you need to setup is the auto waypoints like I have in the screen shot from my last post. You will need to set the details of the flight altitude, speeds and camera settings based on your assignment. Not requiring overlap makes the project very academic and not practical from a survey prospective but I’m not sure what the objectives are so maybe that’s not relevant.
To make it easy on your self I would create the two individual surveys first.
Then for the two survey’s in one flight:
create the first survey, but make sure you do not have the tool create an automatic RTL.
Once the first survey is created and accepted as waypoints, go directly to creating the second survey. Again, don’t let it auto create take off and RTL commands.
You probably need to change the overlap, side lap settings. Also changing the camera settings will vary the number of lines. Given the low altitude you’re looking for most cameras will require a higher number of flight lines to get full coverage.
When the Survey tool is open, make sure you check the box that says “advanced options”. That will allow you to make more adjustments to the grid.