I’m having issues with my quadcopter, Most of the times it is flying perfect but sometimes and without any advise the copter loss altittude and crashes with the floor. The thing is that sometimes when reach the floor and the impact is not severe, i can recover the control of the drone and climb up again.
I noticed that it happens more time in moderate windy days.
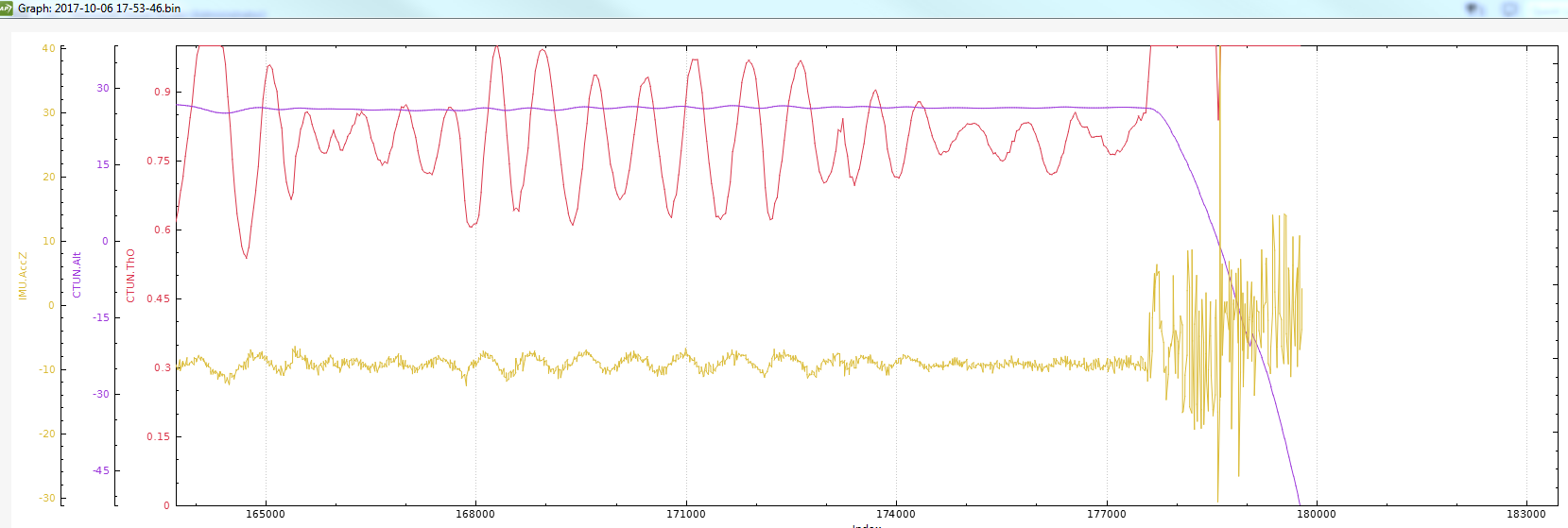
Reviewing the log i see that the Thrust get 100% but the RCOUT to the motor are not at maximum. The thing is that sometimes is hovering normally at 50-60% of thurst and suddenly requires the 100% thrust (as reviewed in the log) and fall down.
Normally I flw in loiter mode, but i tried to change it to stabilize while falling but still continues falling, with the stick at maximum.
It is quite extrange because the drone is pretty stable and good maneuverability, i get speeds of 8m/s in loiter, and angles of 40º without problems (at the exception of this)
I tried with the ESC in NORMAL PWM and with OneShot 125, and the flight is quite similar, but with the second one appears this in the AutoAnalyzer: Test: PM = FAIL - 11 slow loop lines found, max 7.75% on line 21358.
I don’t know if it is a problem of weight, bad configuration but this problem is grinding my gears.
The characteristics of my drone are the following:
Pixhawk 2.4.8
Frame F450.
4xMotors Emax MT2213
4xESC MakerStack / Makerfire 25A with BLHeli firmware 14.6
Plastic Props 1045
Battery 3S / 5500mAh 35C (i have 4, of two brands and happening the same with all)
Total Weigh 1720g With cam, 2axis gimbal, etc
You are right about the throttle. It looks like oscillations due a big gain. I will redo the autotune and check it again.
About the noise during the falling, it appears more with more weight in the drone. In the air i could see the drone agitating a lot. If i remove weight, it looks like a power loss, it is like a forced landing but to fast, then impact the floor and get power again, going up.
I tried with several props, with a quite flexible and harder ones an the same result (always plastic props).
I’m reading now about the sync problems of the esc, but i’m not sure how to check it.
Yes, youre right. It looks similar problems. Are you still having problems reducing the weight?
I have tried it, reducing the weight till 1450g and i still have the same problem, but in this case the drone fall dwon more estable, without many vibrations… but still fall.
The thing is why it can fly normally, and the suddenly fall down.
For now I’m still investigating, for our issue, it looks like bad esc calibration resulting in not having full thrust available. We have still to validate that, but given the takeoff weight we had (4.8kg) and the thrust available given the constructor datasheet.
You RCOUT is not maxed for any rotor ?
EDIT : how is mounted your FCU ?
I heard the way you could try to test your ESC (but I never did that by myself): set your props upside down so adding thrust will push your copter to the ground (use some kind of support under the motors to not to break the legs). Give high RPM and see if there will be a sync problems.
I already have tried it and also tied the drone to the floor with the props in the normal way. The test were going good without any issue. It’s true, that I tried it only a few seconds, and the issue happens few minutes after start, so I will try to do the test longer.
I have the same issue, although on an hexacopter.
Doing individual tests to motors right now, using 6S battery… right now from 25V till 22.3V the thrust stays almost the same varying from 1150 grams to 1200grams at about 60% throttle (ESC directly connected to RX)
So, in my case, at least i know it’s not related to the battery neither the motors not producing enough thrust…
To test for sync is not a full throttle issue but the transition from low to high throttle quickly.
The usual test is to have your throttle on a switch which will allow you to quickly flick from low to high to low and back again.
This should show up any sync issues.
I have tested a lot of thing during those past weeks and I think that my problem is clearly the weight of the drone.
I perform the ESC sync test as Mike said and it works perfectly. Also I update the firmware of them and still the same problems.
I redid the calcs with the eCalc, and i found that with low battery it has only 1.2 Thurst/weight so I use new props.
I fix the issue by now using 3 blade props 1045 instead the normal 2 blades and it looks that works much better.
Also I reduce the weight till 1680g and i test the drone in calm days and doing movements in the air now it is not falling down (i discovered that with 2 blade props and 1800g the problem ocurred more often)
So… now i hope not to burn the motors with the new Props.