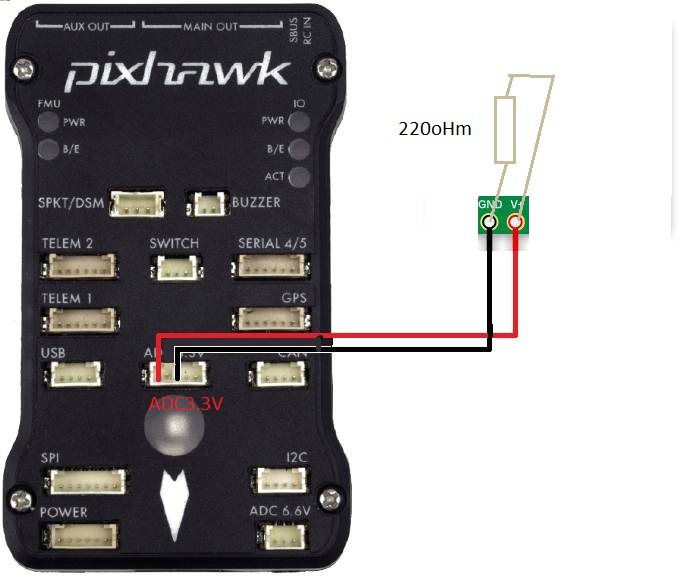
Hey, I found a solution. Instead of soldering a resistor on a capacitor blocking 3.3v LSM303D power supply to discharge the voltage after turning off the power I plugged the 220 Ohm resistor into the ADC3,3V socket. In pixhawk 2.4.8 the LSM303D power supply and the 3.3v pin are connected and this works. I do not know if it will work on pixhawk produced by 3DR where there is a more sophisticated power distribution. In my case, the second IMU resets correctly and I did not have to solder …