Here is my simple version of estimator that I’m using for Copter.
All it does is continuously calculate and report thee things:
- How long I can fly (in minutes) with current power consumption till my battery fully dry out
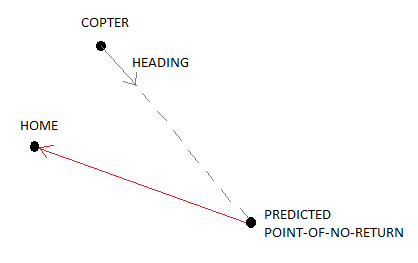
- How long I can fly with the current heading and current power consumption till I reach the point-of-no-return, so my remaining energy in only for RTH.
- How far I can fly forward (in meters) with current heading and current power consumption till I reach the point-of-no-return, so my remaining energy in only for RTH.
So far I’ve tested that in SITL and in few real flights, and it makes accurate estimation.