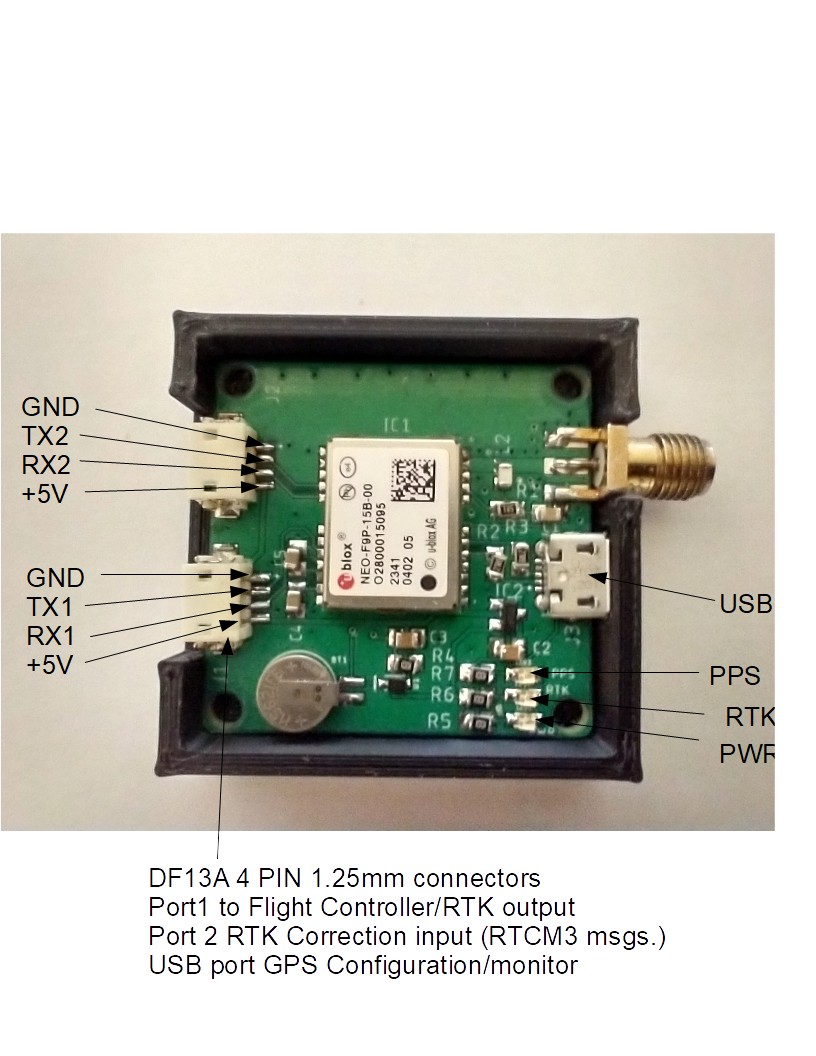
I had time to try the LC29HEA again today. Unfortunately, unlike Yury, my LC29HEA will not switch to float or fix mode, even though the NTRIP data is displayed by the mission planner.
To rule out a trivial parameter error in Arduplane, I connected a U-Blox F9P to the same flight controller and the same serial output as a cross-check.
( By the way: I noticed that MP could only establish a connection to the NTRIP server after EGNOS correction data had been received on the F9P. With an older version of MP, a normal 3D fix was sufficient. A bit mystical, but I didn’t want to look into it today)
After a while, it was possible to get an RTKFIX by the F9P on the windowsill. On instinct, I connected the LC29HEA as a second GPS. And now, after a while, the MP even showed an RTKFIX for the LC29HEA (which was not possible when I had connected it as the only GPS).
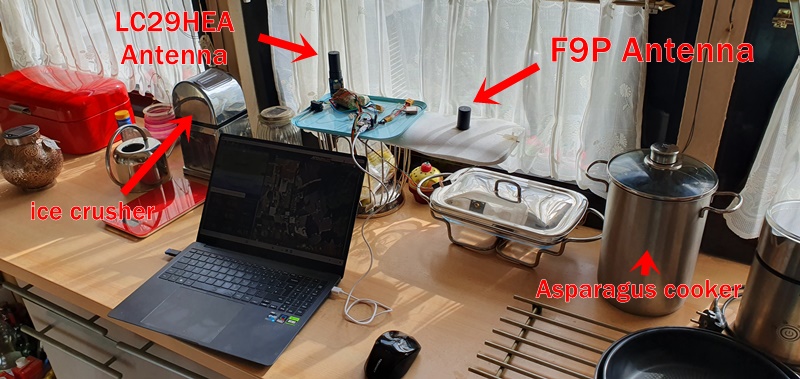
Here is a photo of the wild experimental setup at the kitchen window, ice crusher and asperagus cooker aren’t absolutely necessary 
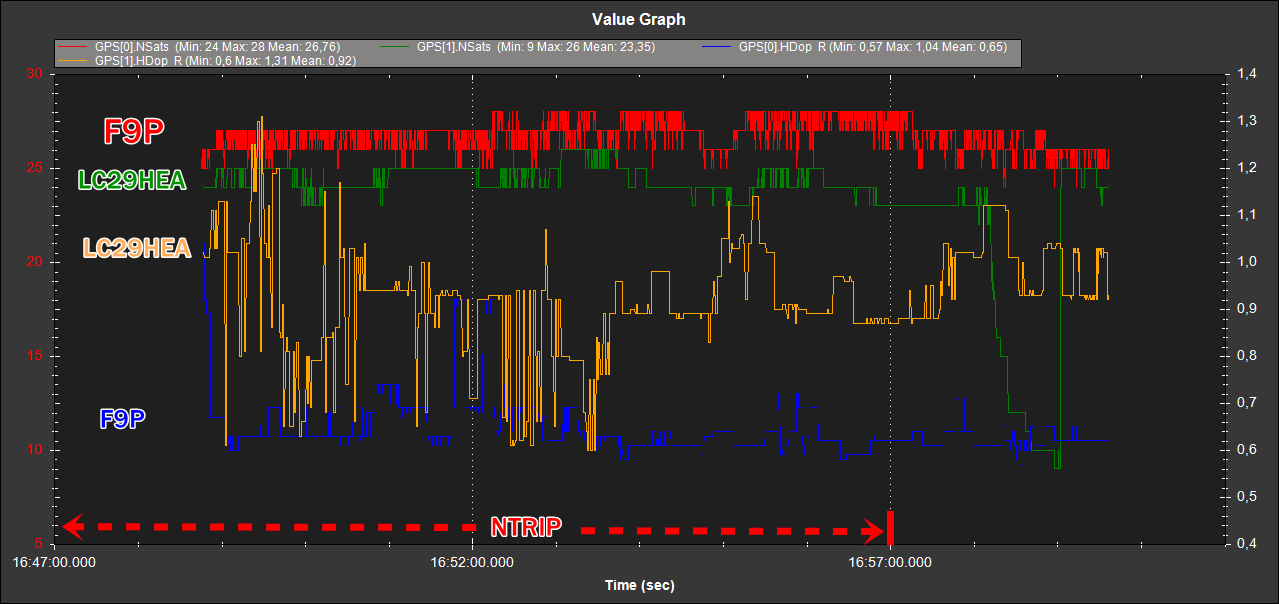
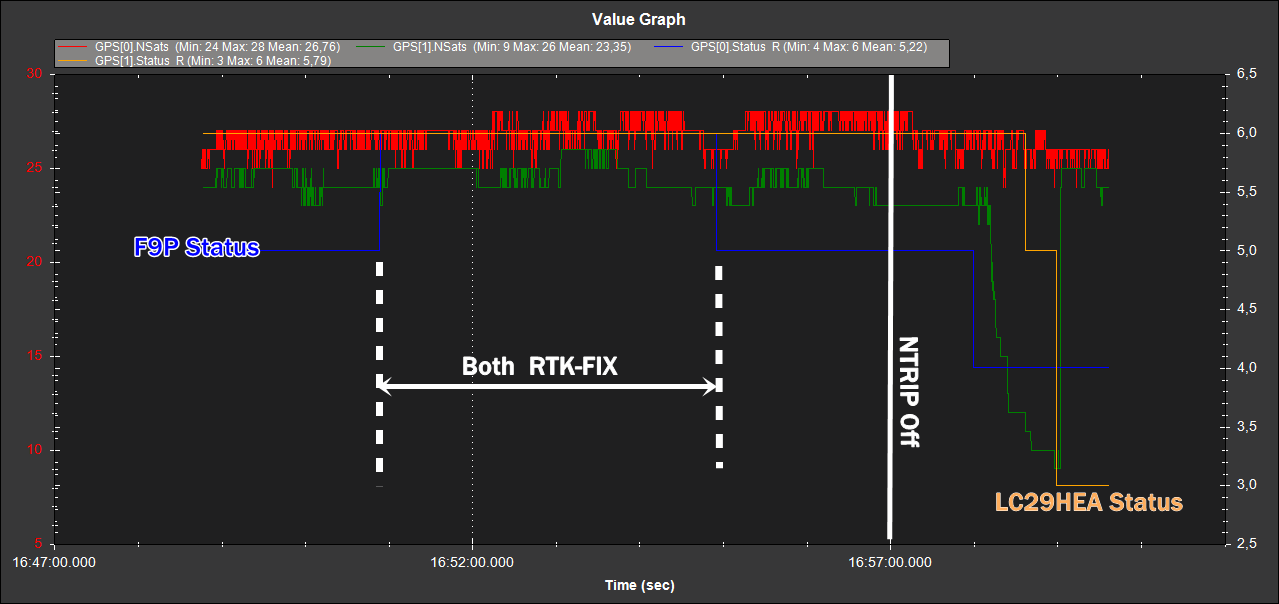
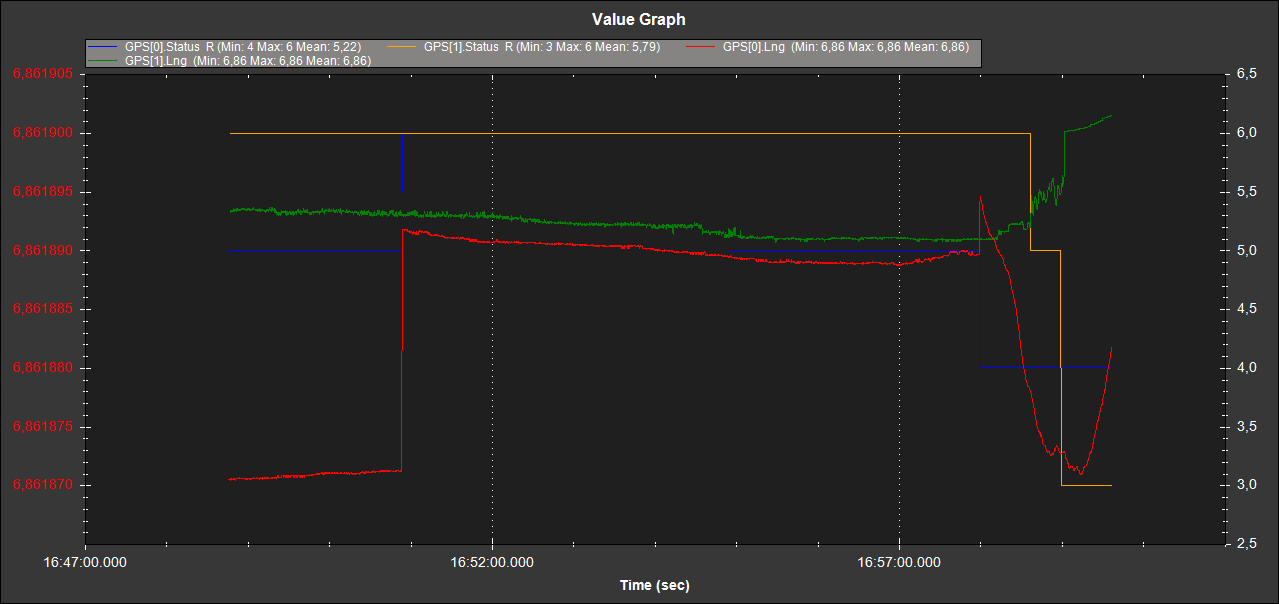
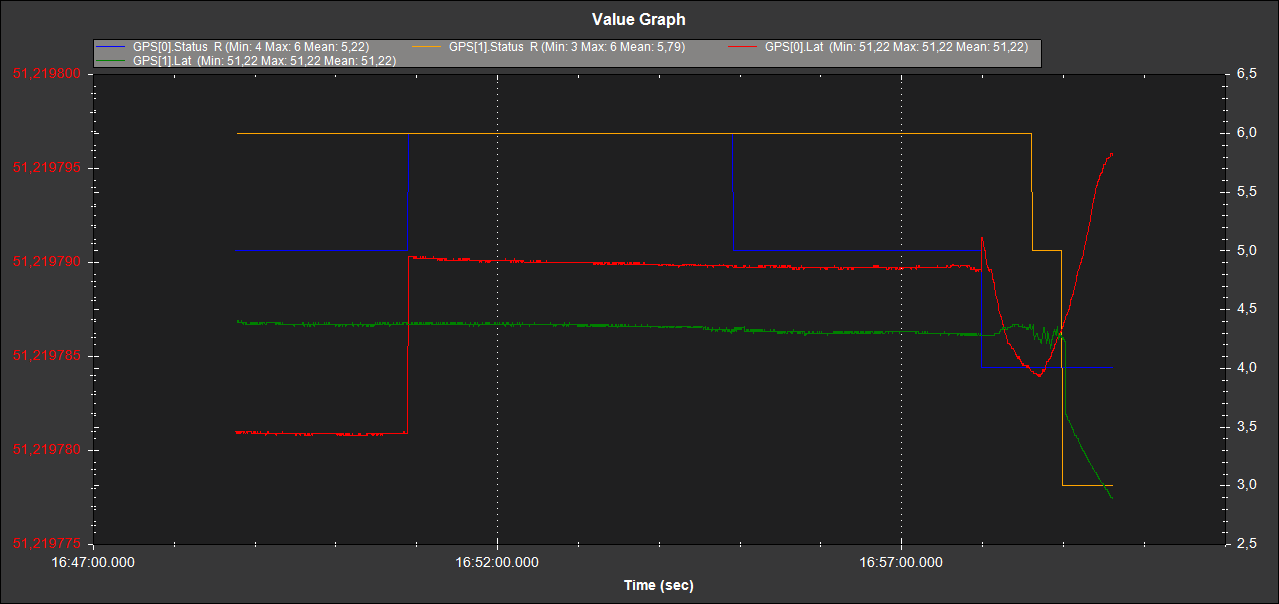
I logged and compared the data for a while: I disconnected the NTRIP data source at 16:57:00 to see the behavior afterwards.
For some time, both GPS had an RTKFIX. I am not surprised that this does not happen at the same time, as as far as I know the F9P is aligned to L1/L2 and the LC29HEA to L1/L5. In addition, the location is so unfavorable that half of the firmament is covered by the house. I should certainly do this outside with a clear view.
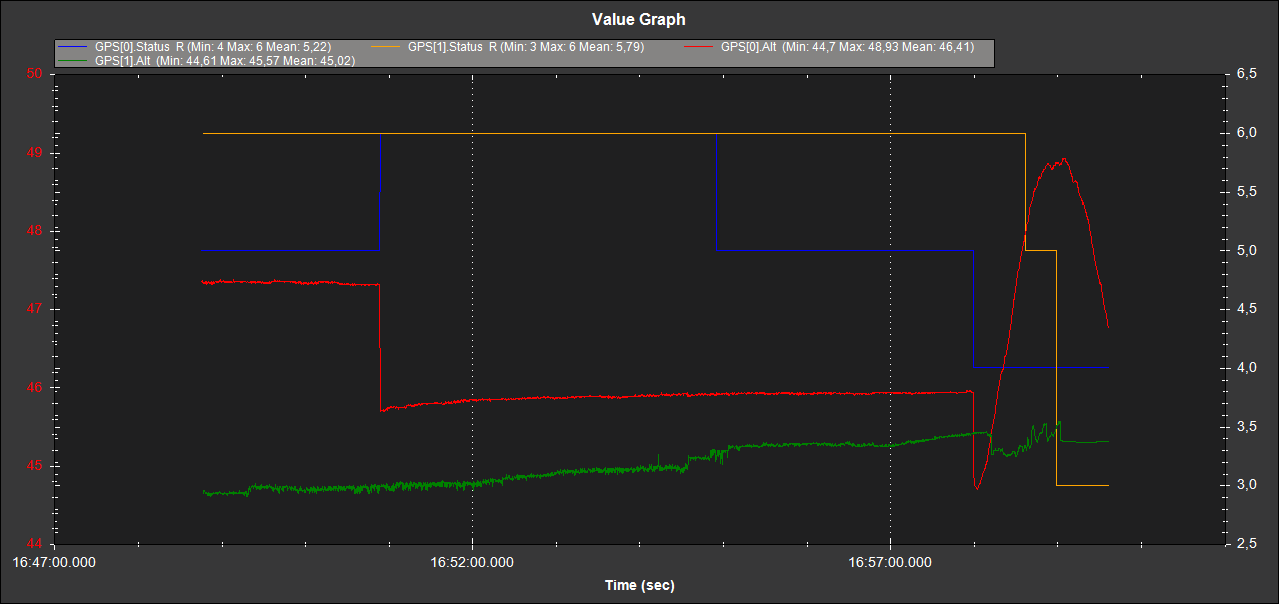
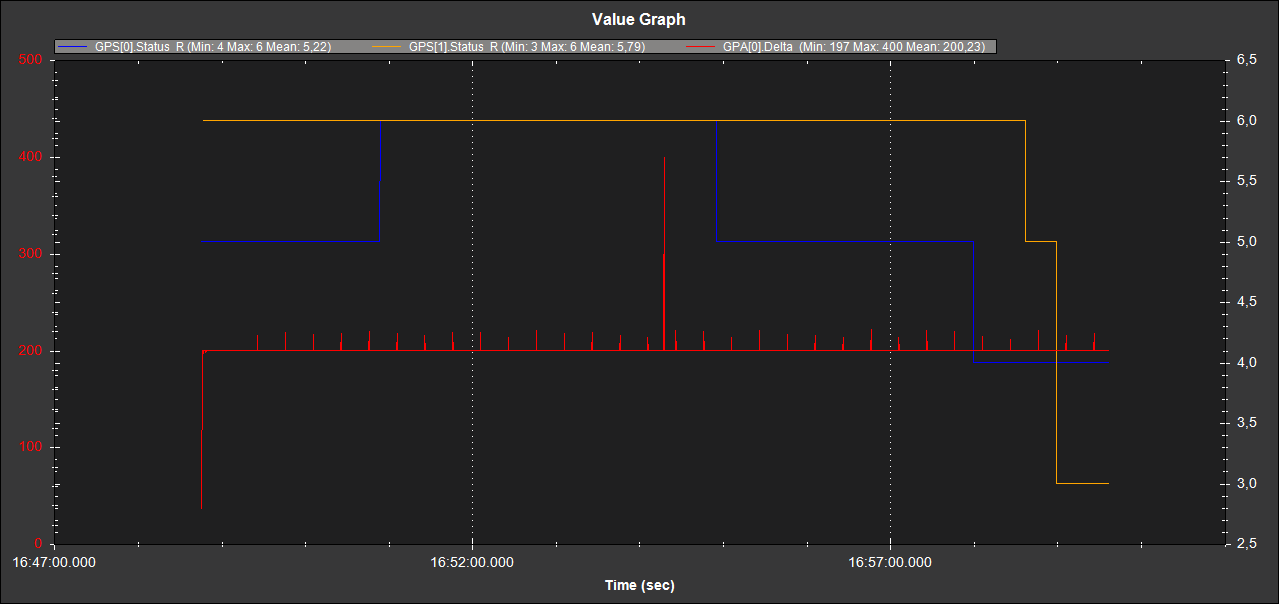
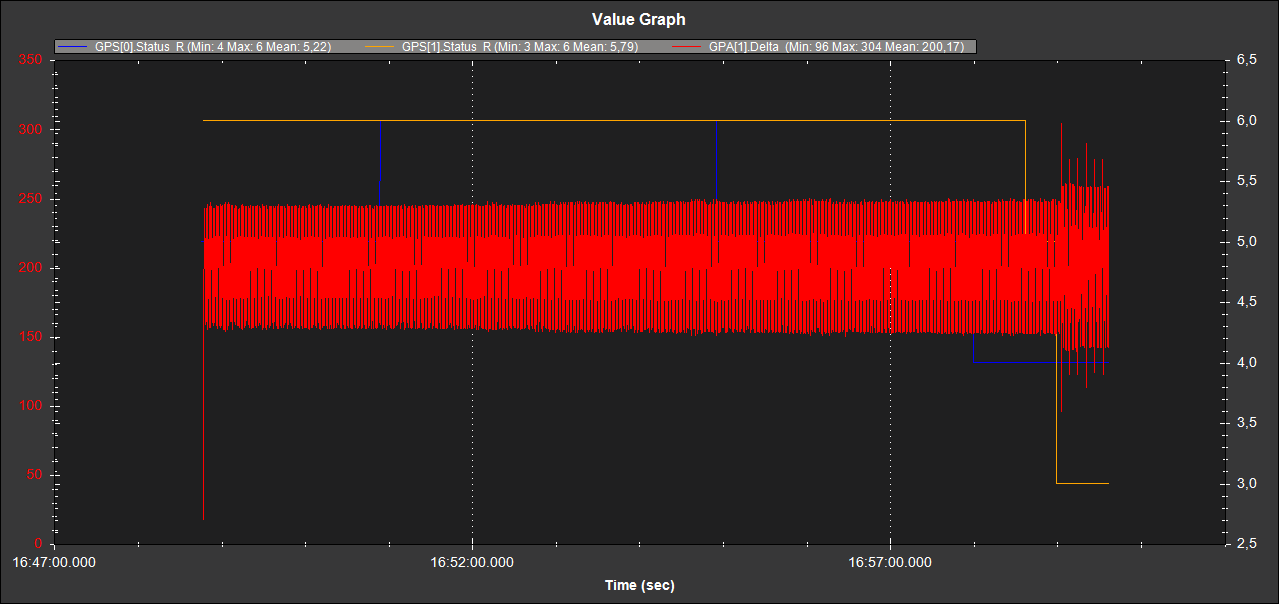
Here are the differences in the lateral and height determinations:
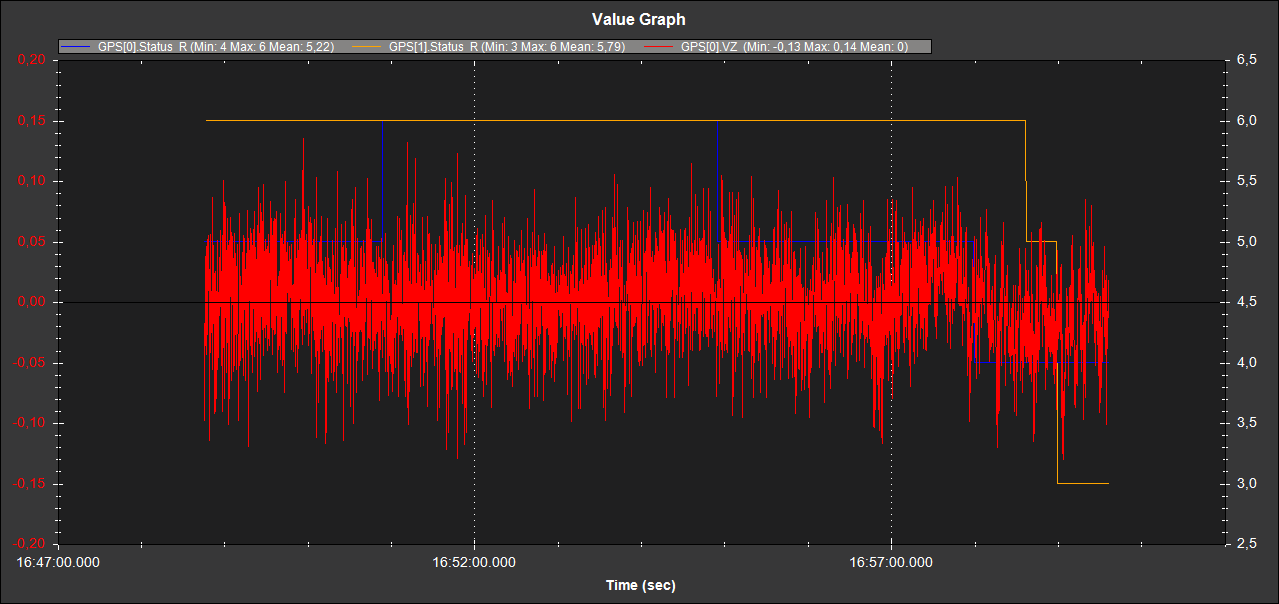
Unfortunately, unlike the F9P, the LC29HEA does not provide climb rates in the current settings (the GPS climb rates are more accurate than those of a barometer).
Now for the timing. F9P:
LC29HEA:
Rolf