Link to log file.
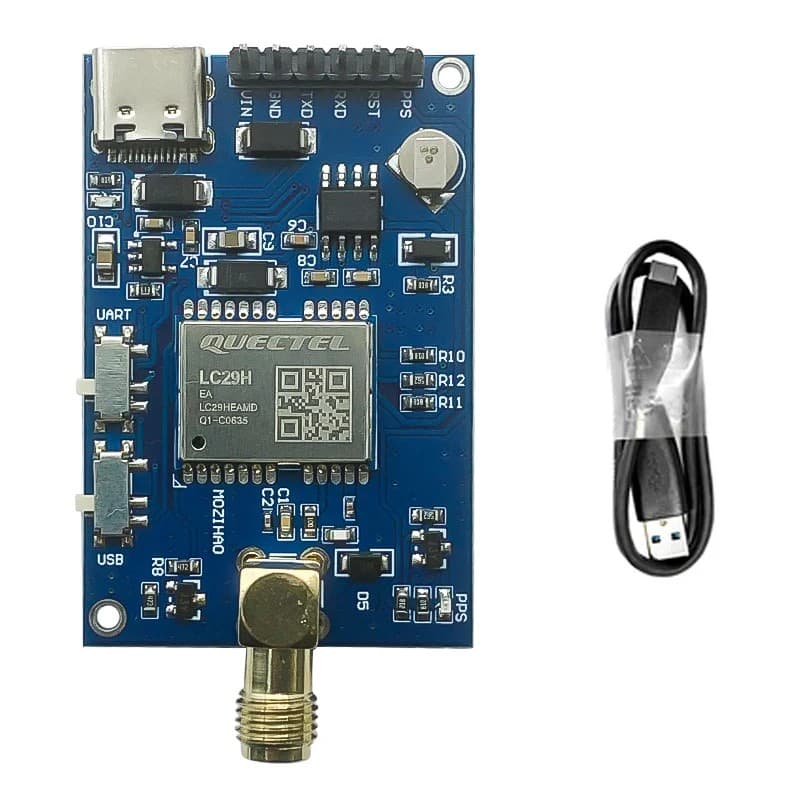
Alos here the LC29HEA firmware ver.
$PQTMVERNO,LC29HEANR11A03S_RSA,2023/10/31,16:52:14*2B
Dennis
Link to log file.
Alos here the LC29HEA firmware ver.
$PQTMVERNO,LC29HEANR11A03S_RSA,2023/10/31,16:52:14*2B
Dennis
Great, thank you! Did you set the update rate to 5Hz via $PQTMCFGFIXRATE,W,200*6A ?
If you’re unsure you should be able to check the current setting via $PQTMCFGFIXRATE,R*71
Yes, i set it to 5Hz
Dennis
Mine arrived today. I haven’t updated it to LC29HEANR11A03S_RSA yet, but first tested NTRIP in the backyard. Almost half of the sky is shaded by the house. The connection worked “out of the box”. I want to update and set it to 5 Hz at the weekend. Thanks again to @Oli1 for the help.
Rolf
…
That’s encouraging!
Wow What could cause that?
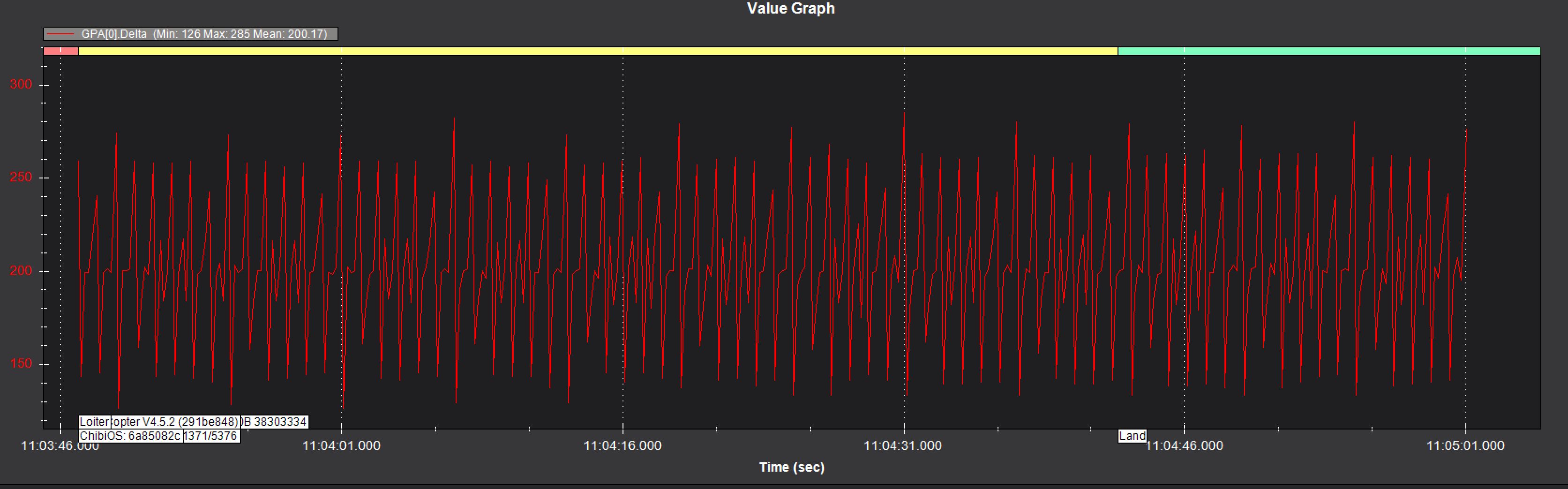
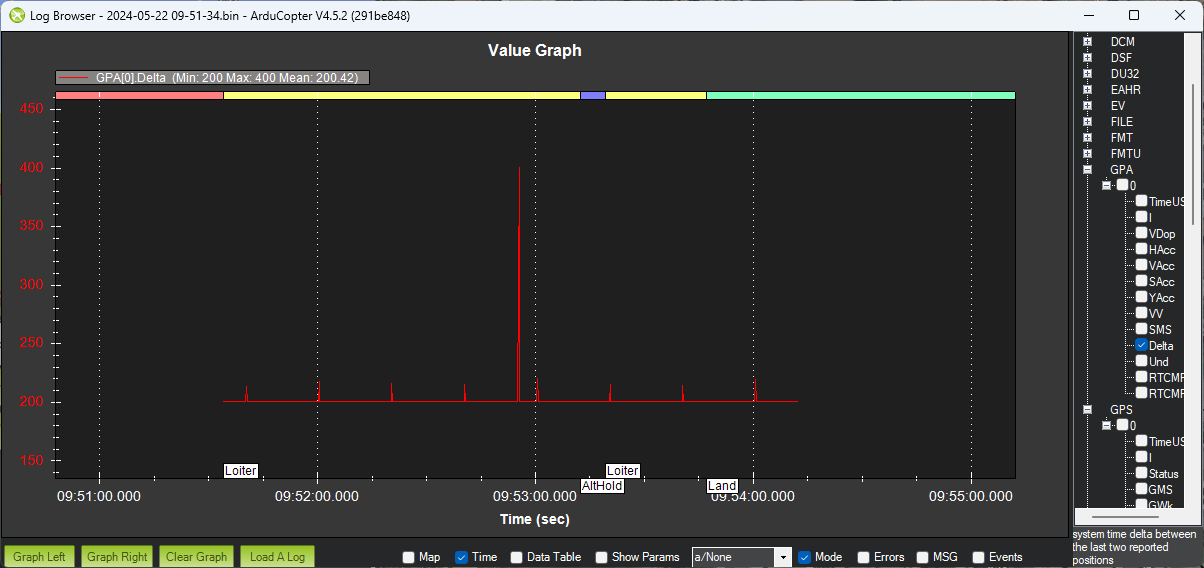
Here is GPA_Delta when using a ublox M9N gps a lot different and works great very stable flight.
Dennis
Not sure and not sure it’s an issue but as you note it’s unusual.
The baud rate for the NMEA gps data is 115200? Not sure what the M9N is and is not NMEA format its ublox ubx format.
Dennis
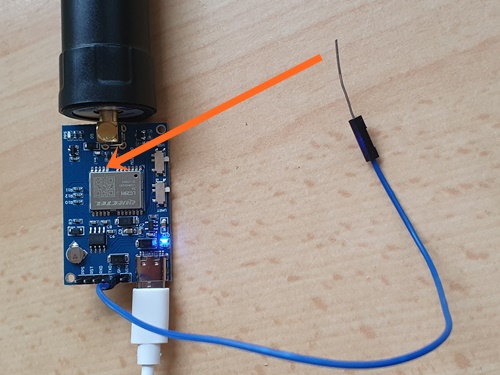
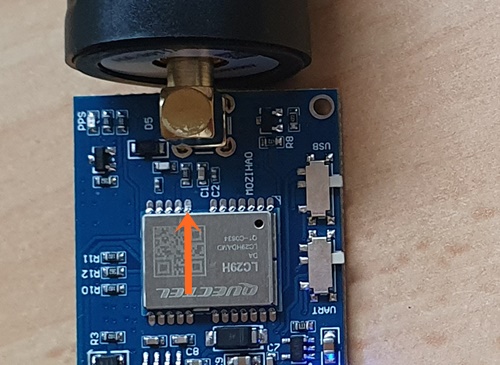
To ground pin 8, I took a small wire and plugged one side onto the ground of the UART pins.
Two *cfg configuration files were found for the firmware upload:
A flash_download.cfg and a flash_download_ms.cfg.
Which is the right one? I have just taken the first one. The update should have worked because the UART was then set to 460800.
I still have to make the settings for Ardupilot. Unfortunately, no NTRIP data was processed with the basic settings after the update, so I first have to look for the parameter settings for this.
Rolf
Two LC29HEA boards for sale on Ebay in USA only 3-4 days ship!
Quectel LC29HEA High Precision Centimeter Level RTK Module GPS L1 L5 Band Drone | eBay
Yuri, you are a mower expert. Do you think 1hz would work for a mower at 1.3m between fixes (and thereby avoid the issues of changing from 10hz to 5hz? If it would, which LC29H model is correct? LC29HDA?
ArduPilot needs 5Hz. Period. Regardless of vehicle type or speed.
I think I have the same problem.

Yes, that looks like the same issue. Haven’t yet found an answer for it?
Dennis
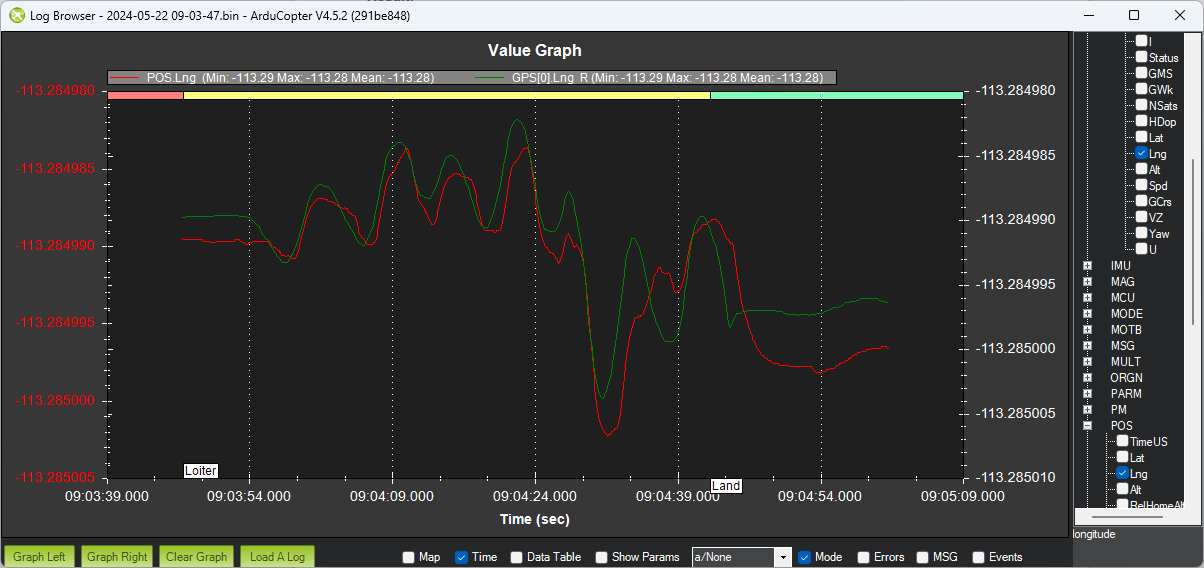
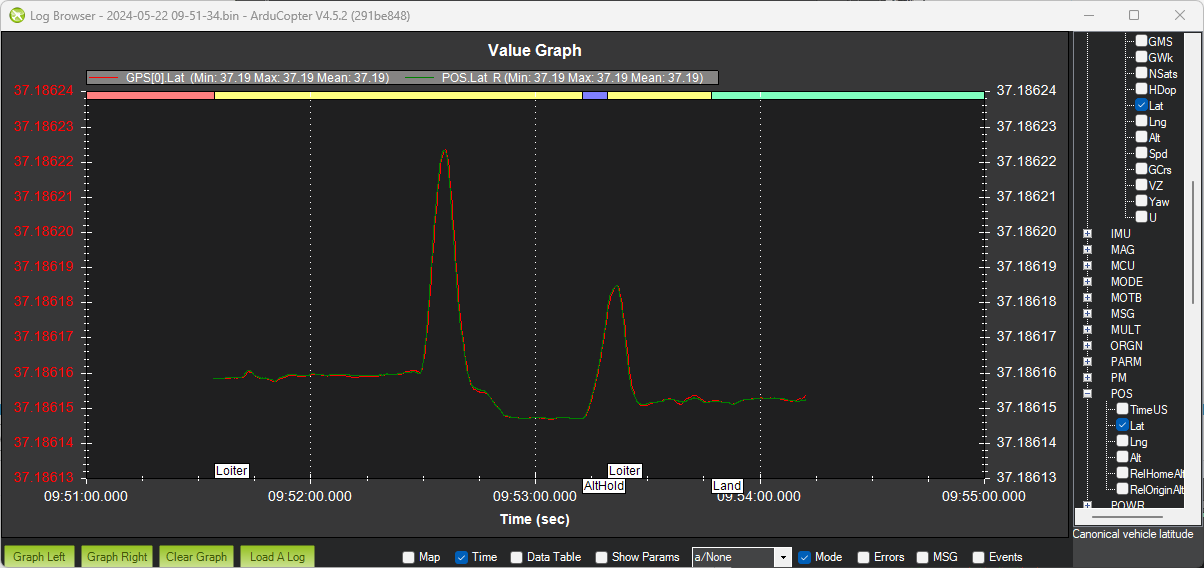
I also found that gps.lat and pos.lat doesn’t track like with a M9N GPS. Why do these have offsets? Were the M9N doesn’t??
Dennis
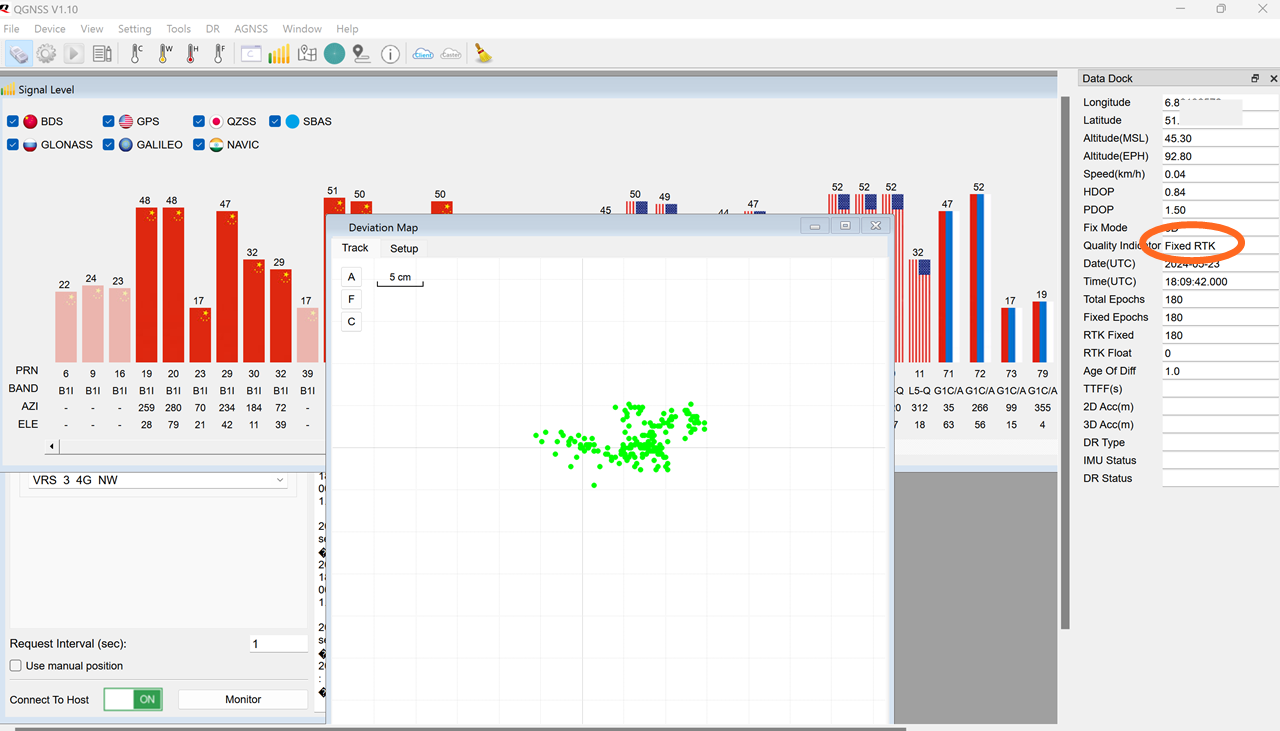
It would be best to compare the two GPS units directly in a same log. POS is the output from the EKF. You might be having EKF issues. How long was the GPS on before the log? Did you have an RTK Fix (status=6)? You moved about 1.3 m total in longitude, without an RTK Fix, an error of 0.5-1.5 m is normal and the EKF is not trusting the GPS too much (if the NMEA messages include the estimated accuracy of the positioning solution). Do you have anything in the GPA log structure?
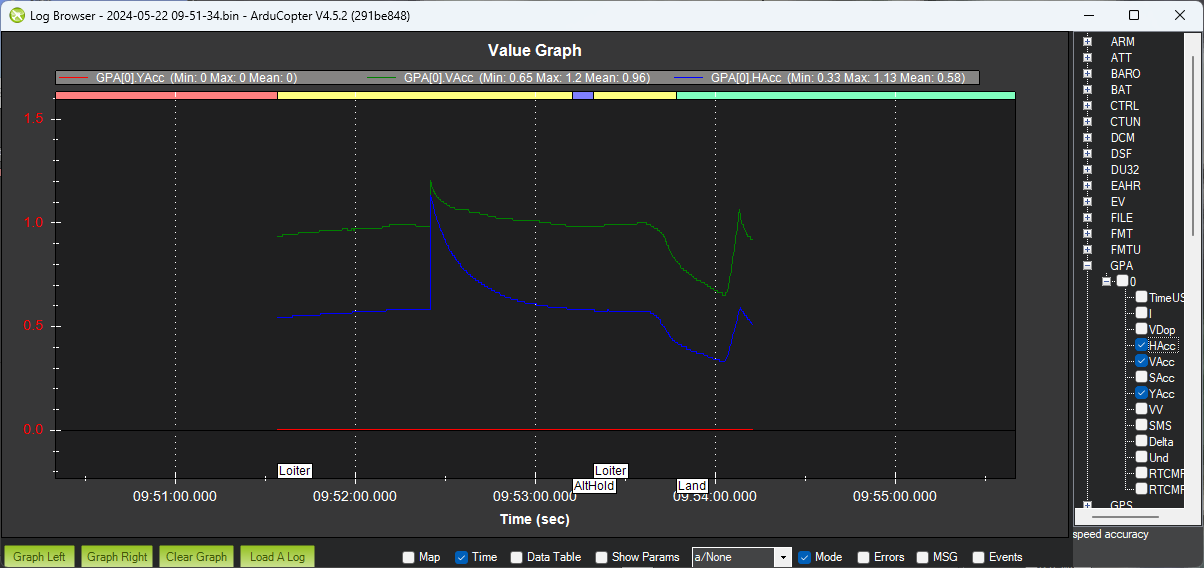
Just saw that you had posted your log. Doesn’t seem that the GPS receiver can keep 5 Hz correctly. Delta varies between 0.15 and 0.25 s. Also no GPS accuracy estimation unfortunately. But Sat count seems excellent. However, your Status = 3, which means you are not in RTK.
Someone correct me if I’m wrong, but if Ardupilot does not receive an accuracy estimate from the GPS receiver, it uses the value from EK3_POSNE_M_NSE? Maybe setting an accuracy of 0.5 m is too optimistic? But by increasing that value, the EKF would trust less the GPS and maybe oscillate less.
What is your accuracy (GPA.HAcc) when flying with the M9N (with and without RTK)?
EDIT:
Maybe the lag from the receiver is greater than the default 0.2 seconds, or maybe much smaller. Can that cause oscillations?
Also, both just in 3D Fix No RTK mode.
Dennis