Hello and sorry for the late reply. I hadn’t noticed your post until now.
As I wrote in the first post, I couldn’t connect the RPM signal directly to the Pixhawk. It would overload the ECU output and seize the motor.
Here’s the schematic of the amplification circuit I built:
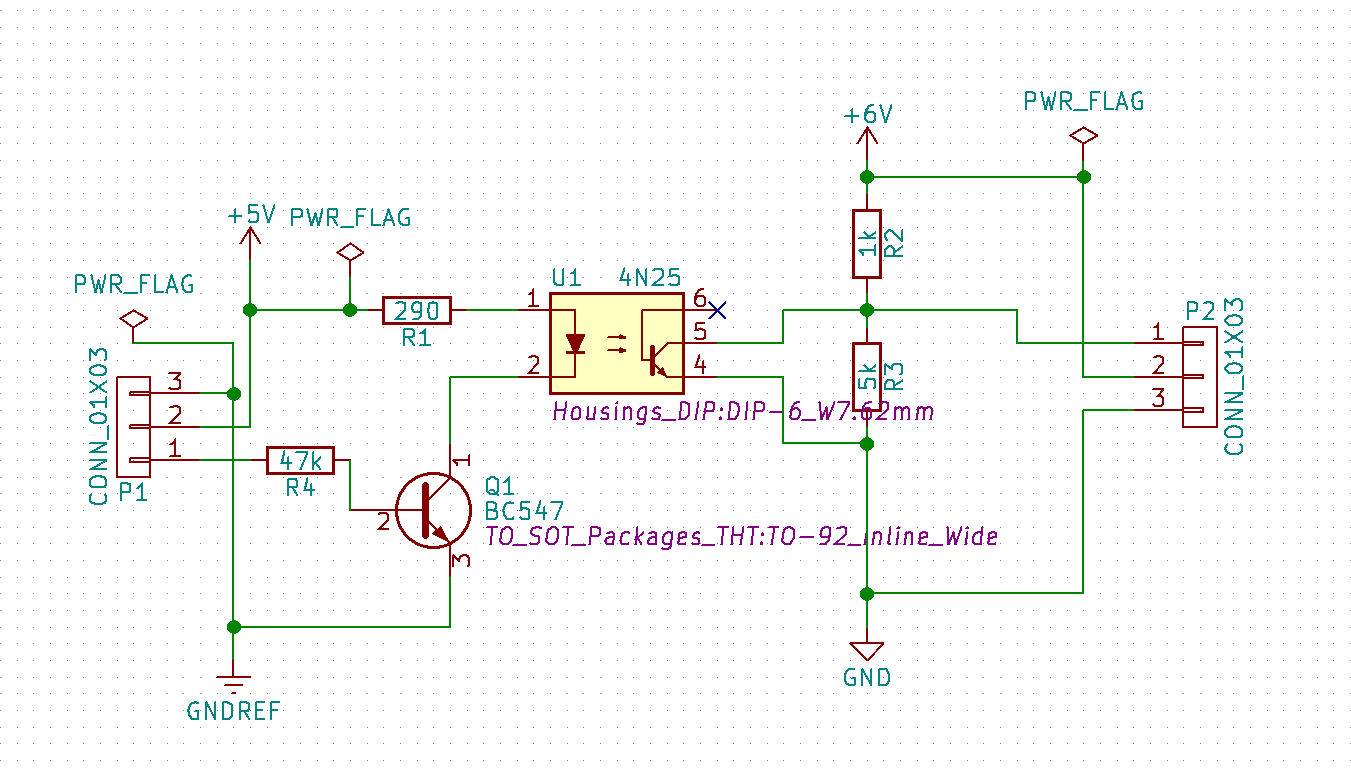
P1:1 is the RPM output from the engine ECU.
P2:1 is the output RPM signal towards Pixhawk, which should be connected according to this