Hello @Fayeli unfortunately, I am having issues with PRX1 no data still after following the manual there, how are your physical connections? are you doing 5v and ground from the telem 1 port and external supply? or just external?
Also are you grounding it on telem1 port?
hi
sorry to hear that.maybe you can try to ask Slamtec to sent you an sample?I already gave up about lidar.
BTW,is there any way to have a auto switch that to open a loudspeaker or a flash light if rover’s proximity sensor detects an obstacle(anything in AVOID_MARGIN distance) as a warning.
For example, some curious babies surround ROVER to watch, or someone may not notice ROVER is approaching
hi
try to check the Baud rate if your lidar in working(you can hear the vioce from lidar’s motor).
5v and ground from the telem 1 port or external supply just depend on your autopliot hardware.It cannot be generalized
There’s no feature by default to flash a light or play a sound when an obstacle is close so the most I can suggest is to try and do it using a Lua script. If you’re up for a little Lua coding here are some examples that might help:
@rmackay9 do you think it could be because of the hardware I am using? I am using cube orange (not the plus), with the pixhawk board and 4.5.1 software.
I continue getting the same error. My motors on the sensor are not spinning despite plugging in exactly how the manual states I continue getting prx-1 no data.
I checked the voltage on each wirings its 3.3 volts on rx and tx and on power i get 5.2 volts. everything is correct including my wiring. My parameters are according to the user manual.
Do you have avoid or rngfnd values changed ? For terra ranger i know they recommend changing avoid values too.
When i do plug in the sensor to my computer it connects.
What firmware version are you using ? Any other guidance for me or any supporting documents such as your parameter file that i could request ?
I am trying to replicate to see how i could get this working for Ardurover because my device is not responding to either ardurover or copter.
I faced same issue in my rover.
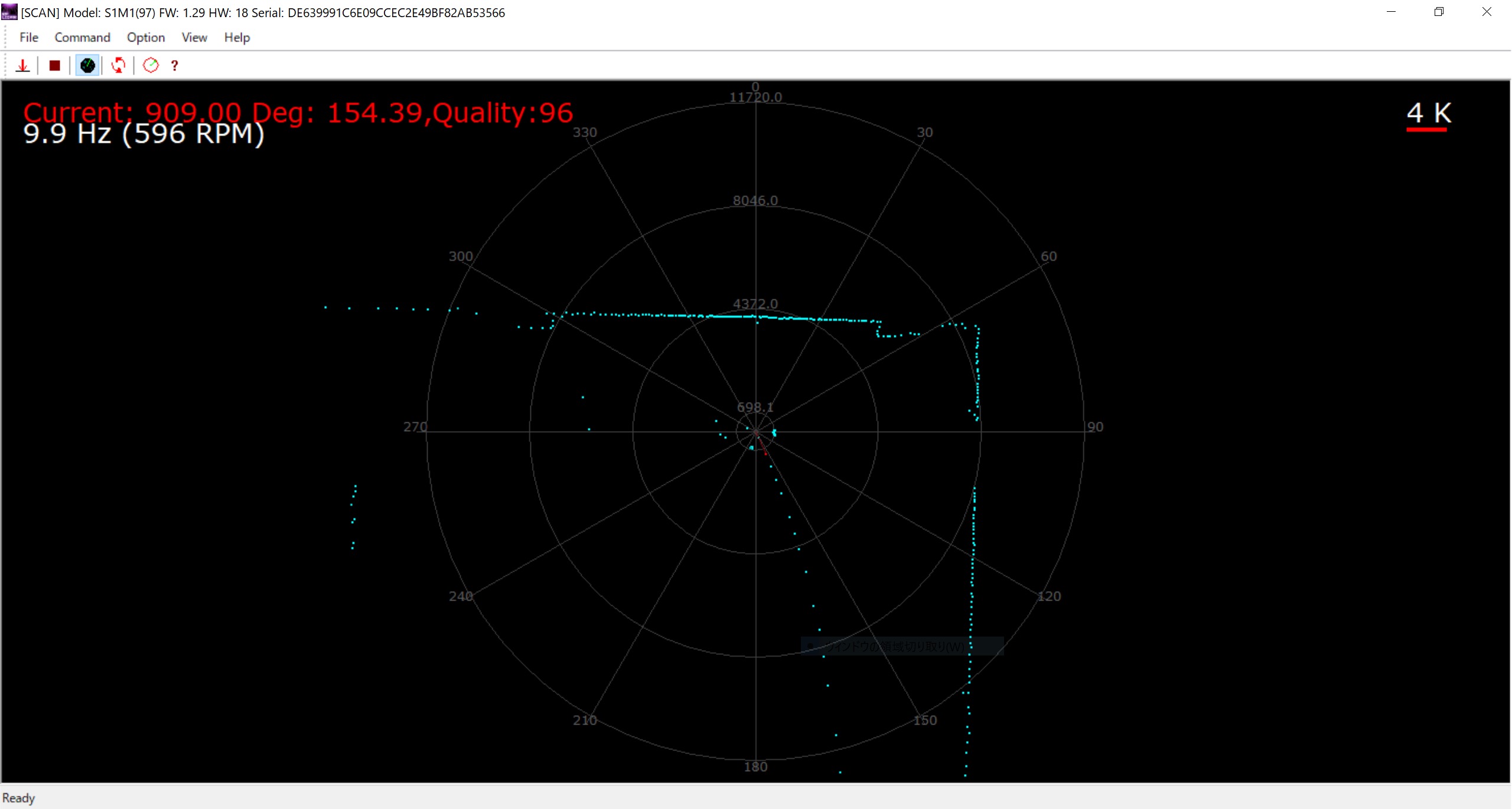
I tested S1 in outdoor using framegrabber from SLAMTEC. It very noisy in Standard scan mode. But I found it is very clearly in DenceBoost scan mode in same condition.